 PDF(2192 KB)
PDF(2192 KB)

临近空间柔性飞行器输出反馈控制方法研究
王民泰, 曹云峰, 周嘉麒
PDF(2192 KB)
 中国指挥与控制学会会刊
军事装备类重点期刊
中国指挥与控制学会会刊
军事装备类重点期刊
临近空间柔性飞行器输出反馈控制方法研究
Research on Output Feedback Control Method of Near Space Flexible Aircraft
柔性飞行器(Flexible Flying Wing Aircraft,FFWA)因具有高升力系数、低阻力系数等优点而受到广泛关注。受到结构动力学和刚体动力学的耦合作用,飞行器容易发生弹性形变,给柔性飞行器的建模造成困难,也给控制系统的设计带来挑战。为此,针对飞翼布局柔性飞行器模型,研究了一种自适应输出反馈控制方法,并在飞翼布局柔性飞行器上进行仿真验证。首先,搭建飞翼布局柔性飞行器纵向动力学模型,并进行配平;然后,对非线性纵向动力学模型线性化得到线性飞行器模型;然后,设计包括基于观测器的基线设计和基于修正闭环参考模型的参数自适应在内的自适应输出反馈控制器,总体上保证了存在不确定参数时的稳定性和跟踪性能;最后,验证了输出反馈控制器在加入修正闭环参考模型时的优越性能。仿真结果表明,运用输出反馈控制能够很好地处理飞行器模型存在不确定参数的问题,并且加入修正闭环参考模型能够提高控制器的参数自适应性能。
Flexible flying wing aircraft has attracted extensive attention because of its high lift coefficient and low drag coefficient. Due to the coupling of aircraft structural dynamics and rigid body dynamics, aircraft is prone to elastic deformation, which not only makes it difficult to model flexible aircraft, but also brings challenges to the design of control system. Therefore, an adaptive output feedback control method is designed for the flexible aircraft model of the flying wing configuration, and the simulation application is carried out on the flexible flying wing aircraft. Firstly, the longitudinal dynamic model of flexible flying wing aircraft is constructed and the trim analysis is carried out. Then, the nonlinear longitudinal dynamic model is linearized to obtain the linear aircraft model. Then, an adaptive output feedback controller is designed, including observer based baseline design and parameter adaptation based on modified closed-loop reference model. The overall design ensures the stability and tracking performance in the presence of large parameter uncertainty. Finally, the superior performance of the output feedback controller under the condition of parameter adaptation with modified closed-loop reference model is verified. The simulation results show that the output feedback control can well deal with the parameter uncertainty of the aircraft model, and adding the modified closed-loop reference model can improve the parameter adaptive performance of the controller.
临近空间; 飞翼布局; 柔性飞行器; 纵向动力学模型; 输出反馈控制器 {{custom_keyword}};
near space; flying wing layout; FFWA; Longitudinal dynamics; output feedback control {{custom_keyword}};
| [1] |
孟新宇. 临近空间飞艇建模与控制关键技术研究[D]. 南京: 南京航空航天大学, 2017.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [2] |
张健, 张德虎. 高空长航时太阳能无人机总体设计要点分析[J]. 航空学报, 2016, 37(S1):1-7.
高空长航时(HALE)太阳能无人机(UAV)的基本工作原理与常规动力飞机相比有显著的区别,体现在飞机总体设计方法上有其独到之处,方案设计中还需要对一些关键技术细节进行认真权衡。阐述了高空长航时太阳能无人机总体设计中遵循的重量不变和能量平衡原则的机理,同时从太阳能无人机巡航平飞功率需求、布局形式选取、飞行剖面优化和临近空间使用环境影响等方面出发,研究了太阳能无人机总体设计中的若干注意事项,主要结论可用于高空长航时太阳能无人机总体设计和方案优化。
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [3] |
张健, 王江三, 耿延升, 等. 高空长航时太阳能无人机的技术挑战[J]. 航空科学技术, 2020, 31(4):14-20.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [4] |
杨铭超. 近空间飞行器起飞段抗风及模态切换鲁棒控制器设计[D]. 南京: 南京航空航天大学, 2017.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [5] |
李军, 李占科, 宋笔锋. 联翼高空长航时无人机总体布局设计研究[J]. 飞行力学, 2009, 27(4):1-4.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [6] |
吕蓉蓉. 大柔性飞行器阵风扰动影响分析及稳定控制研究[D]. 南京: 南京航空航天大学, 2018.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [7] |
沈华勋, 徐亮, 陆宇平, 等. 飞翼式柔性飞机纵向动力学建模与稳定性分析[J]. 动力学与控制学报, 2016, 14(3):241-246.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [8] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [9] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [10] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [11] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [12] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [13] |
靳瑾, 张景瑞, 刘藻珍. 带有执行机构不确定性的航天器自适应姿态跟踪与参数辨识方法[C]// 第四届全国动力学与控制青年学者研讨会论文摘要集,辽宁,大连, 2010:102-103.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [14] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [15] |
胡志坤, 孙岩, 姜斌, 等. 一种基于最优未知输入观测器的故障诊断方法[J]. 自动化学报, 2013, 39(8):1225-1230.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [16] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| {{custom_ref.label}} |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
PDF(2192 KB)
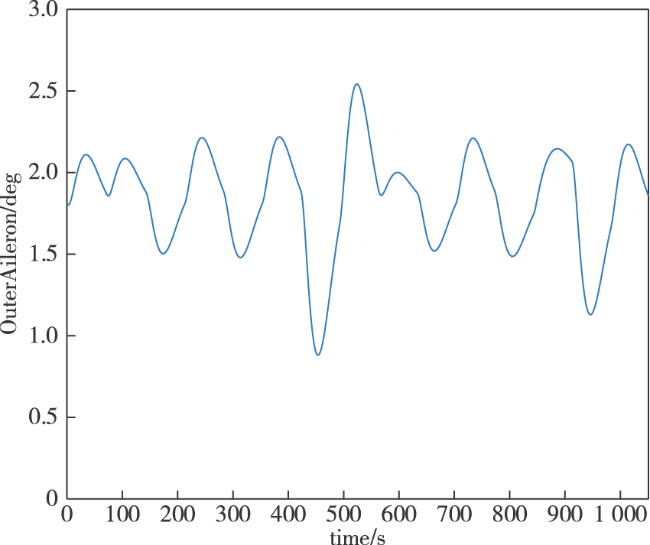
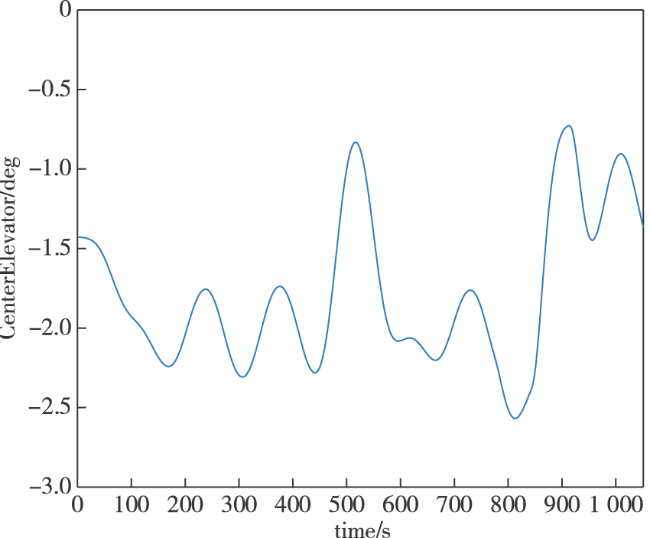
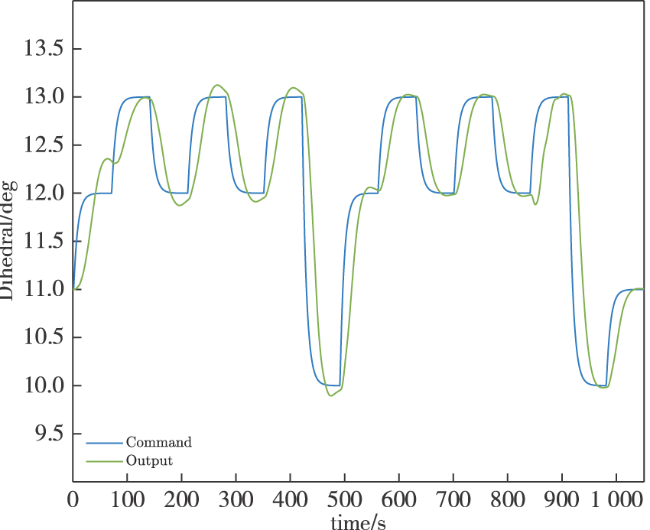
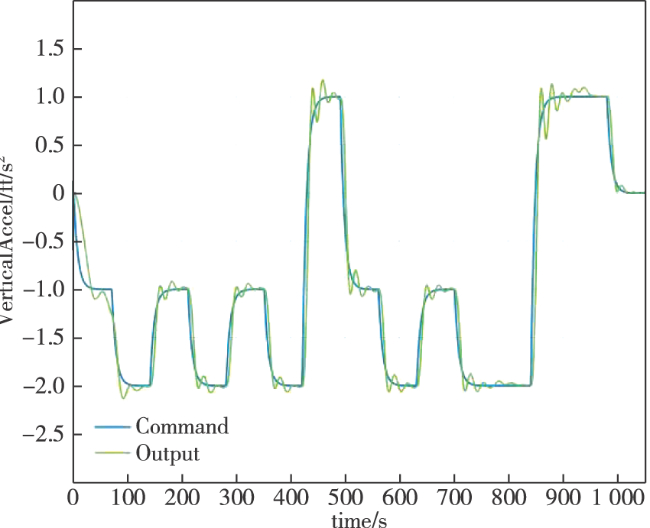
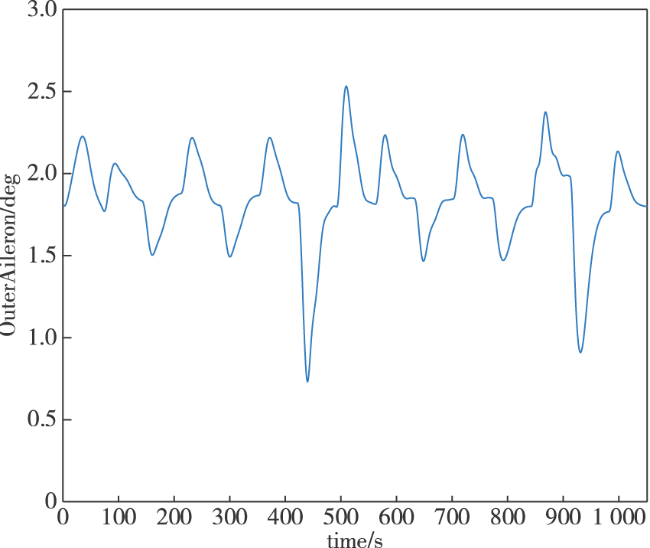
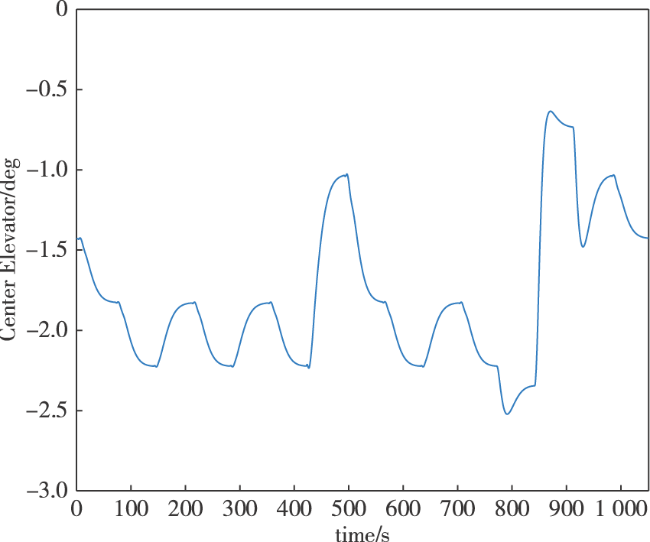
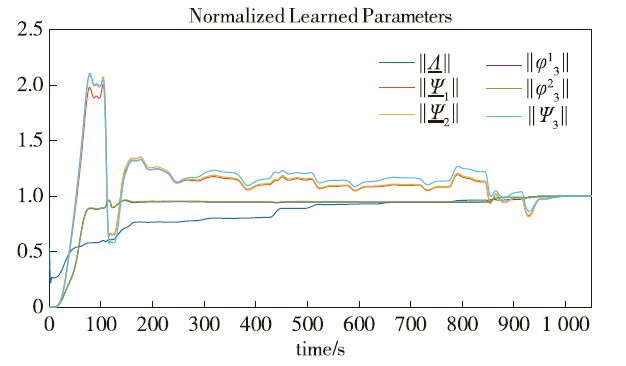
 图1 柔性常规翼飞行器图2 柔性联接翼飞行器图3 飞翼型柔性飞行器图4 柔性飞翼型飞行器图5 柔性飞行器配平结果图6 基线LQR控制下的二面角图7 基线 LQR控制器下的垂直加速度图8 基线LQR控制器下的外副翼图9 基线LQR控制器下的升降舵图10 自适应输出反馈控制下的二面角图11 自适应输出反馈控制下的垂直加速度图12 自适应输出反馈控制下的外副翼图13 自适应输出反馈控制下的升降舵图14 自适应输出反馈控制器的参数轨迹
图1 柔性常规翼飞行器图2 柔性联接翼飞行器图3 飞翼型柔性飞行器图4 柔性飞翼型飞行器图5 柔性飞行器配平结果图6 基线LQR控制下的二面角图7 基线 LQR控制器下的垂直加速度图8 基线LQR控制器下的外副翼图9 基线LQR控制器下的升降舵图10 自适应输出反馈控制下的二面角图11 自适应输出反馈控制下的垂直加速度图12 自适应输出反馈控制下的外副翼图13 自适应输出反馈控制下的升降舵图14 自适应输出反馈控制器的参数轨迹/
| 〈 |
|
〉 |





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}