 PDF(8316 KB)
PDF(8316 KB)

有向通信约束下的AUV集群组队行进方法
刘昊, 范玺斌, 李冬
PDF(8316 KB)
 中国指挥与控制学会会刊
军事装备类重点期刊
中国指挥与控制学会会刊
军事装备类重点期刊
有向通信约束下的AUV集群组队行进方法
A cooperative formation method for AUV swarm under directed communication constrains
为了实现水下任务场景中的无人潜航器(AUVs)集群高效组队行进,提出了一种基于有向通信约束的AUV集群组队行进方法。该方法基于真实水下环境中潜水器之间的有向通信限制,通过仿真法模拟通信条件,利用自研方法控制集群内跟随艇与领导艇之间的相对位置,实现潜航器之间的感知和交流,自适应调整队形、协调行动,并有效应对规划任务需求和环境变化。基于该方法的原理、设计框架和实现过程,通过仿真和实验结果验证了其有效性。
The formation movement of Autonomous Underwater Vehicle (AUV) clusters has significant application value in underwater missions. To achieve efficient collaboration and formation movement of AUV clusters in underwater mission scenarios, this paper proposes a method for AUV cluster formation movement based on directed communication constraints. This method utilizes the directed communication limitations between vehicles in real underwater environments through simulation to mimic communication conditions and employs a self-developed method to control the relative positions between follower vehicles and leader vehicles within the cluster. This approach thereby enables perception and communication between AUVs, adaptively adjusts formations, coordinates actions, and effectively responds to task requirements and environmental changes. This paper introduces the principles, design framework, and implementation process of the proposed method, and verifies its effectiveness through simulation and experimental results.
有向通信约束; AUV集群; 组队行进; 任务协同; 环境感知 {{custom_keyword}};
directed communication constraints; AUV swarm; formation control; task coordination; environment perception {{custom_keyword}};
| [1] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [2] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [3] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [4] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [5] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [6] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [7] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [8] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [9] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [10] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [11] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [12] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [13] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [14] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [15] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [16] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [17] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [18] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| {{custom_ref.label}} |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
PDF(8316 KB)
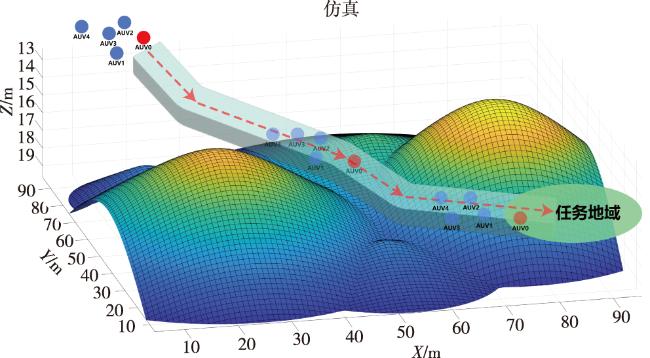
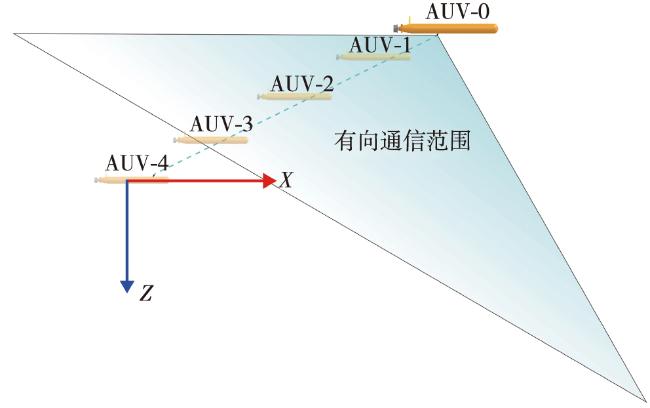
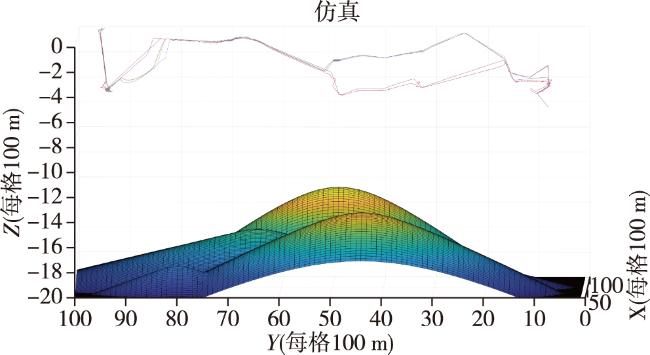
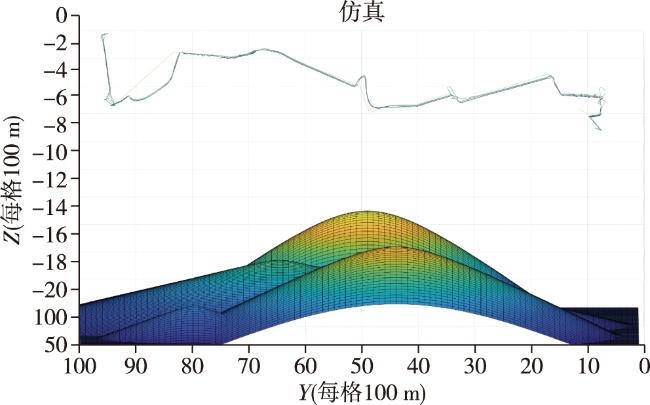
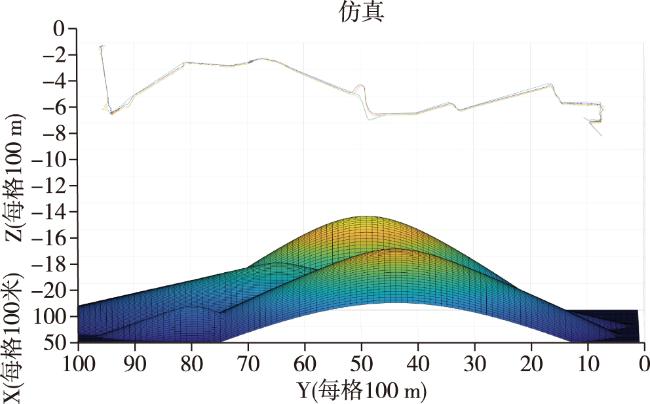
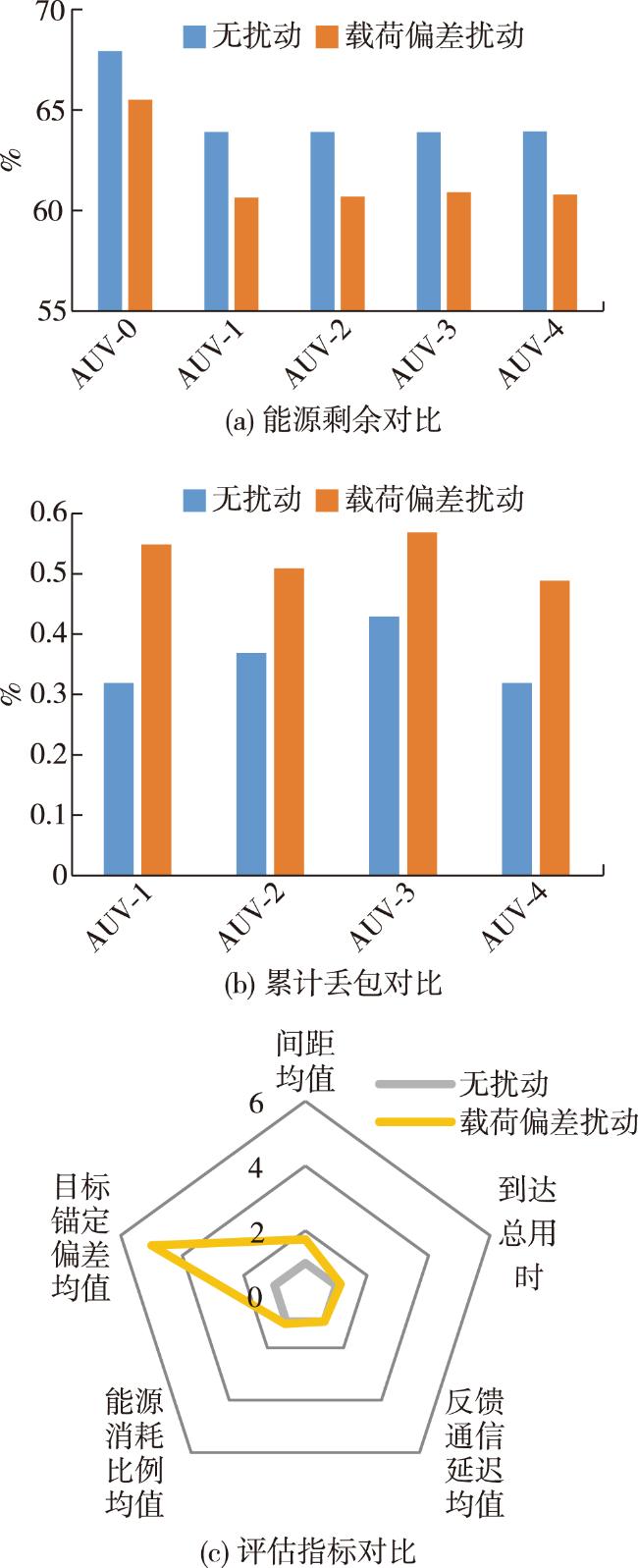
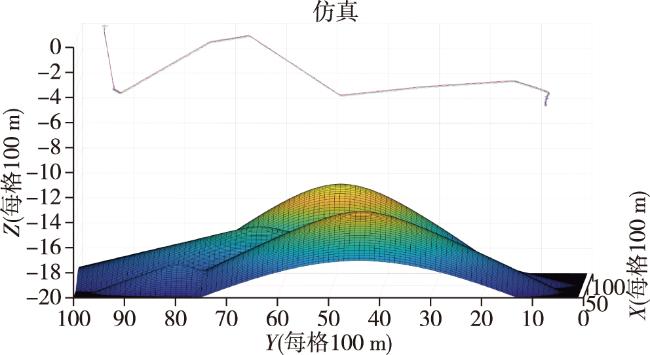
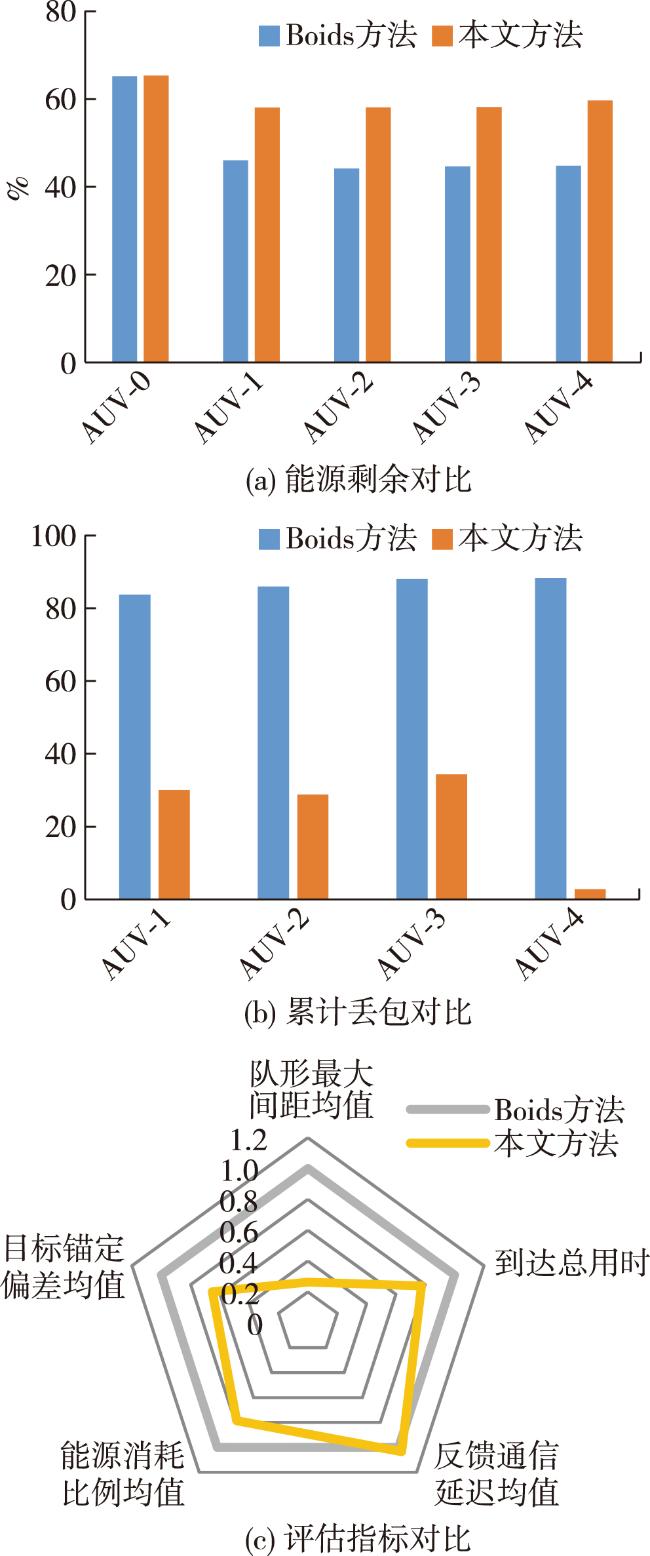
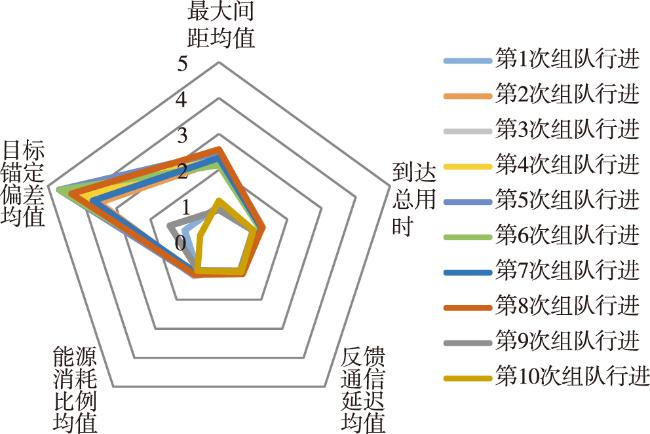
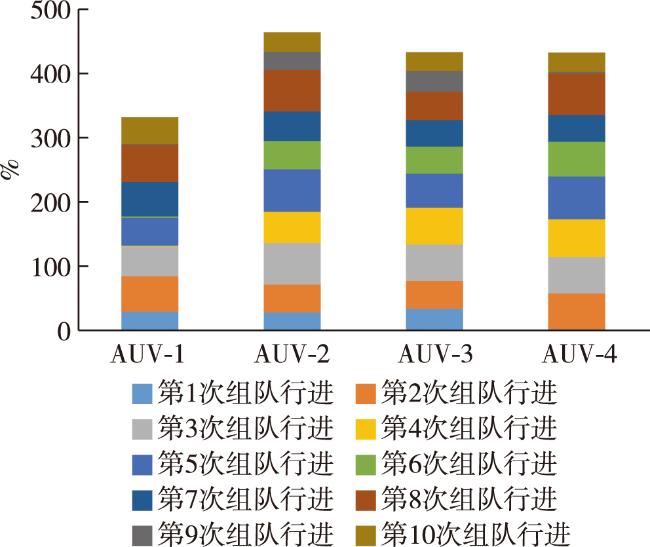
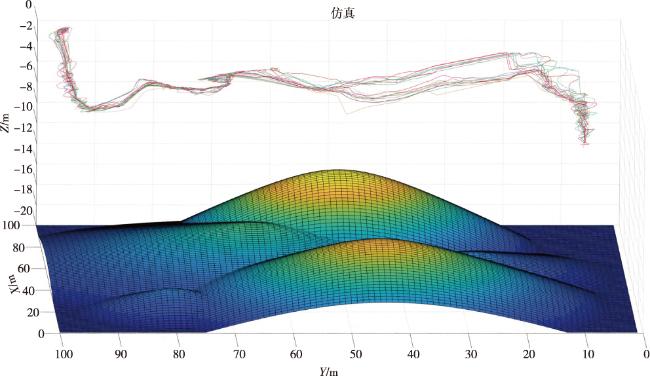
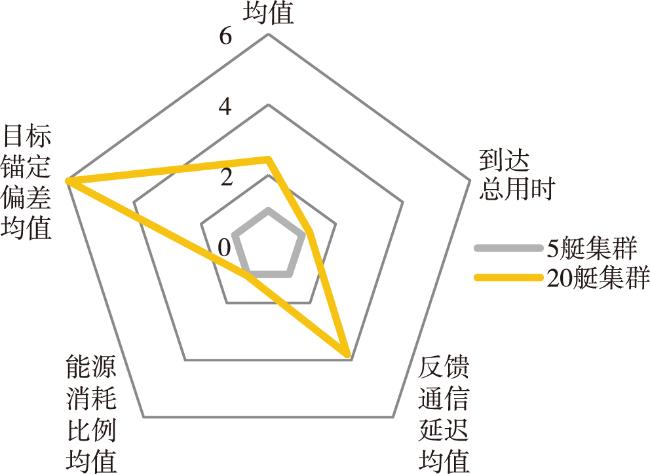
 图1 组队行进任务描述图2 有向通信限制示意图3 叠加海洋环境扰动前后的AUV运动轨迹(1号为未叠加环境扰动轨迹,2号为叠加环境轨迹)图4 有向通信队形示意图图5 集群组队行进效果(无扰动)图6 集群组队行进效果(叠加外界环境扰动)图7 多维评估指标对比图8 集群组队行进效果(叠加载荷偏差扰动)图9 多维评估指标对比图10 集群组队行进效果(叠加定向通信扰动)图11 多维评估指标对比图12 多维评估指标对比图13 评估指标对比图14 各AUV能源消耗变化图15 各AUV丢包率变化图16 集群组队行进效果(20艘AUV)图17 评估指标对比图18 集群队形剖面效果(20艘AUV)
图1 组队行进任务描述图2 有向通信限制示意图3 叠加海洋环境扰动前后的AUV运动轨迹(1号为未叠加环境扰动轨迹,2号为叠加环境轨迹)图4 有向通信队形示意图图5 集群组队行进效果(无扰动)图6 集群组队行进效果(叠加外界环境扰动)图7 多维评估指标对比图8 集群组队行进效果(叠加载荷偏差扰动)图9 多维评估指标对比图10 集群组队行进效果(叠加定向通信扰动)图11 多维评估指标对比图12 多维评估指标对比图13 评估指标对比图14 各AUV能源消耗变化图15 各AUV丢包率变化图16 集群组队行进效果(20艘AUV)图17 评估指标对比图18 集群队形剖面效果(20艘AUV)/
| 〈 |
|
〉 |








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}