
 中国指挥与控制学会会刊
中国指挥与控制学会会刊 雷达高分辨率距离像(High Resolution Range Profile,HRRP)是在目标尺寸远大于雷达距离分辨单元的情况下,目标散射点的子回波在雷达视线方向上投影的矢量和,它包含着目标丰富的结构信息,如目标沿雷达视线的投影大小、散射点分布、电磁散射特性等。同时,由于HRRP易于获取,占用存储空间小,有利于目标识别系统的高效运行,以上优势使得在雷达目标自动识别(Radar Automatic Target Recognition,RATR)领域中,基于HRRP的雷达目标识别成为一种很有应用前景的识别方法[1⇓-3]。
目前,基于HRRP的目标识别的研究重点主要分为特征提取和分类器设计两个方面,常用的特征提取方法主要分为以下三类:1)基于变换域的HRRP目标识别方法,该方法通过提取信号变换域的平移不变特征缓解了HRRP信号的平移敏感性,提高目标的识别性能,张瑞等人[4-5]研究了HRRP的谱特性,将信号的频谱、高阶谱以及对数谱和双干谱特征作为一种有效特征进行分类识别的能力。2)基于统计建模的HRRP目标识别方法,假设在某一段角域中,HRRP信号服从某种特定的统计分布,通过训练数据集估计出在该段角域中统计模型的参数,再利用训练好的统计模型参数作为特征进行目标识别[6-7]。3)基于子空间的HRRP目标识别方法,采用奇异值分解(Singular Value Decomposition, SVD)、主成分分析(Principal Component Analysis, PCA)等方法,通过降低信号维度的思想,把高维的HRRP信号投影到低维空间上,再利用低维特征进行雷达HRRP目标识别[8⇓-10]。分类器设计主要分为以下两类:1)基于机器学习的目标识别方法,在HRRP目标识别问题中,机器学习的算法得到了广泛应用,研究人员进行了深入的探索和尝试,并将k最近邻(K-Nearest Neighbors, KNN)算法应用到了HRRP目标识别中[11],这使目标识别性能得到了极大的提升。除了k最近邻算法之外,支持向量机(Support Vector Machine, SVM)[12]和随机森林(Random Forest,RF)算法[13]也是雷达目标识别任务中常用的分类器,这些算法已广泛应用于各种HRRP目标识别场景中,并且都取得了不错的成果。2)基于深度学习的HRRP目标识别方法,通过深度神经网络自动提取出HRRP目标的深层结构特征,减少了对丰富的研究经验和大量的先验知识的依赖[14],文献[15]提出了一种一维卷积神经网络(Convolutional Neural Network, CNN)结构,再利用多类目标的HRRP数据集进行测试,验证了CNN应用于HRRP分类识别的可行性,Tu等人[16]提出了一种基于长短时记忆网络(Long Short-Term Memory, LSTM)的雷达目标识别方法,该方法可以有效地提取出更具有分辨性的序列特征。
雷达目标识别系统在现代化军事领域的实际应用中,对非合作目标的识别更具有实际意义,但我们往往很难获取非合作目标大量的、全角域姿态角下的样本[17]。上述各种方法构造的目标识别模型在具有大量的、完备角域的HRRP训练集的情况下通常都能得到较好的识别性能和泛化能力,但是,若样本数量不足,角域数据不全,则会导致模型参数估计不准,进而在测试阶段性能较差,出现对训练数据的过拟合问题。
基于此,本文提出了一种基于时间序列森林(Time Series Forest,TSF)[18]的HRRP识别方法,该方法是对随机森林(RF)算法进行了改进。相较于传统的RF算法,TSF算法能够更好地利用时间序列的特性,提取样本区间特征,生成多个新的区间样本训练集,再用新训练集对决策树进行训练。在决策树的学习过程中,该方法采用了一种熵和距离增益的准则,实现了决策树内部节点的高质量分裂。最后,该方法基于多个时间序列树进行投票得到最终的识别结果。该方法在HRRP实测数据上进行了测试,并与HRRP目标识别领域经典算法(如KNN、SVM、RF、CNN和LSTM)进行了比较。
实验结果表明,基于TSF的HRRP目标识别方法具有较优的识别性能,并且在不完备角域训练集的情况下,具有更好的角域推广能力,能够实现在不完备角域训练集情况下对完备角域数据的有效识别,具有一定的应用前景。
1 决策树和分裂准则
1.1 决策树
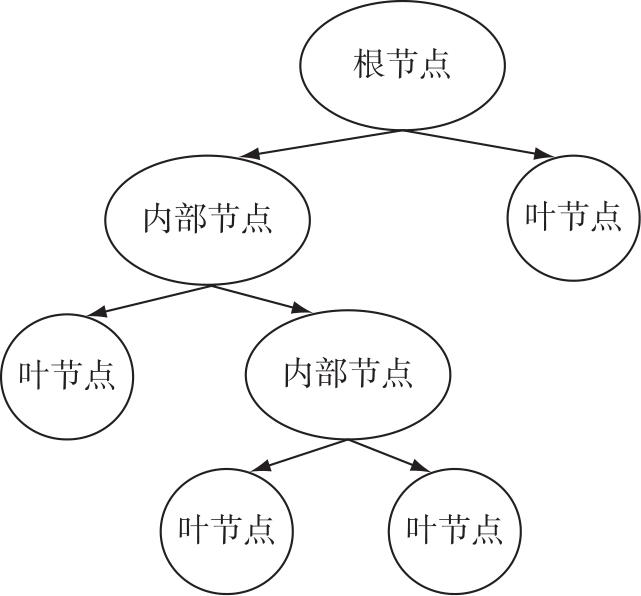
决策树是时间序列树的基础,它是一种树型分类器,能够把一个复杂的分类问题分解成几个简单的分类问题来解决。图1 为决策树分类示意图,其中决策树由根节点、内部节点和叶节点三部分组成,根节点表示整个训练样本集,每一个内部节点对应着一个分裂属性,该属性根据某种分裂准则将样本划分为不同的部分,树的叶节点被标记为某类数据的集合。用决策树进行分类的过程就是从根节点开始,在内部节点中通过分裂准则进行分裂,最终到达某一叶子节点,将该叶子节点的类别标签作为本次的分类结果。决策树的优点是不需要太多的先验知识,可解释性强,能够很好地处理缺失值和异常值,缺点是它容易对训练数据过拟合,导致其泛化能力较差。
一般来说,决策树每一个节点需要一个分割标准来定义它的最佳分裂属性,熵增通常被用作树状模型中的分裂标准。样本集Y的熵定义为
H(Y)=- p(Y,t)×log2(p(Y,t))
熵增被定义为
Gain(y)=H(Y)- ×H(Yt)
式中,{Y1,Y2,…,Yt}表示利用特征y对训练样本集Y划分得到的子集集合;H(Y)表示样本集Y的熵;p(Y,t)表示Y中包含的第t=(1,2,…,T)类目标样本的比例;Gain(y)表示特征y对应的熵增益;H(Yt)表示样本子集Yt的熵;N(Y)表示Y中的样本数。式(2)中分裂的熵增Gain(y)是子节点的熵值H(Yt)加权和与父节点的熵值H(Y)之差,其中子节点的权值是分配给该子节点的样本比例 。
1.2 分裂准则
熵增体现了分离类的有用程度,然而,在实际分类中,候选分离的数量可能很大,而且经常出现多个候选分离具有相同的熵增的情况。因此,时间序列树采用了熵增和距离度量的组合Entrance增益作为分割准则。即对于每个特征类型,选择具有最大Entrance增益的分割。此外,如果某个节点的Entrance增益没有改善,则该节点被标记为叶节点(例如,所有特征都有相同的值或所有实例都属于同一类别)。Entrance增益的计算过程如下:
Entrance=Gain(y)+α·Margin
Margin= | (t1,t2)-τ|
式中,样本总数为N,每个样本长度为M,t1和t2为样本上的某个时刻(1≤t1≤t),区间特征类型的数量为K,fk(t1,t2)(k=1,2,3…,K)表示样本在区间(t1,t2)上的第k个特征, (t1,t2)为节点上第n个样本在区间(t1,t2)上的第k个特征的值,τ为候选阈值,Margin为候选阈值τ和其最近的特征值之间的距离,α为一个足够小的常数,在模型中的唯一作用是打破仅由熵增产生的联系。
2 基于时间序列树森林的HRRP识别算法
2.1 基于HRRP区间特征的时间序列树构建
根据时间序列不同区间计算的特征为时间区间特征,在区间上可提取各种类型的区间特征,但一般更倾向于提取简单且可解释强的特征,例如平均值、标准差和斜率等。
对于HRRP序列x(x=x1,x2,…,xM),xt为第t个距离单元的强度,M为HRRP序列的长度,fk(t1,t2)(1≤t1≤t)表示在t1到t2区间内的第k个特征,其中三种区间特征的计算步骤如下:
f1(t1,t2)=
f2(t1,t2)=
f3(t1,t2)=
式(5)(6)(7)中,f1(t1,t2),f2(t1,t2),f3(t1,t2)分别是区间训练集{(t1, ),(t1+1, )…,(t2, )}上的均值、标准差和最小二乘回归斜率。
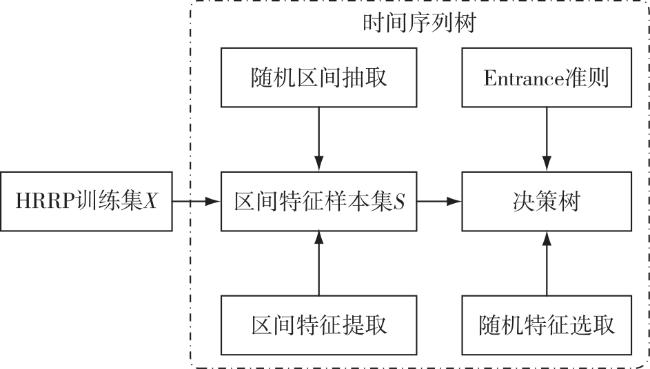
时间序列树采用了自举重采样策略提取区间特征,原始训练样本集为X=(X1,X2…,XN),对其中每一个训练样本都进行同样的操作:从样本Xi中随机抽取m个相同的区间,并求得各个区间的均值、标准差和最小二乘斜率三种特征,重构成长度为3m区间特征序列Si,再使用重构的区间特征集训练决策树。
训练决策树的过程中采用了随机森林中的随机采样策略,在每个节点,只测试从由3m个特征组成的完整特征集中随机抽取的L个特征,如此,可以在后续时间序列森林训练过程中,实现信号整体特征的无偏估计。基于上述方法,时间序列树的训练过程如图2 所示。
2.2 HRRP识别TSF分类器设计
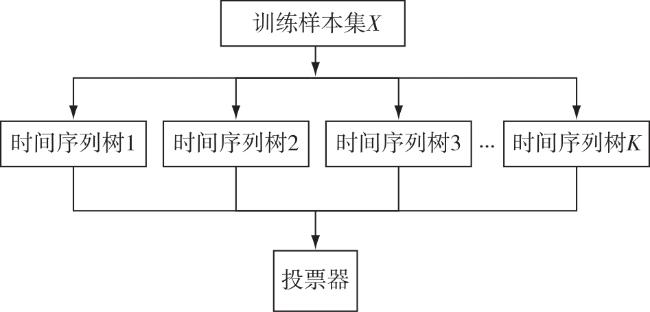
如图3 所示,一个完整的TSF由K个时间序列树{F(X,θk),k=1,2,…,K}组成,其中,X代表HRRP训练样本集,{θk}代表第k个时间序列树中独立同分布的随机向量,样本共有T类,h(X,θk)的取值c=(1,2,…,T)为样本的类别编号,最终这K个训练好的时间序列树投票决定待分类样本的类别。
2.3 算法流程
TSF分类器的训练和测试阶段的流程图如图4 所示。
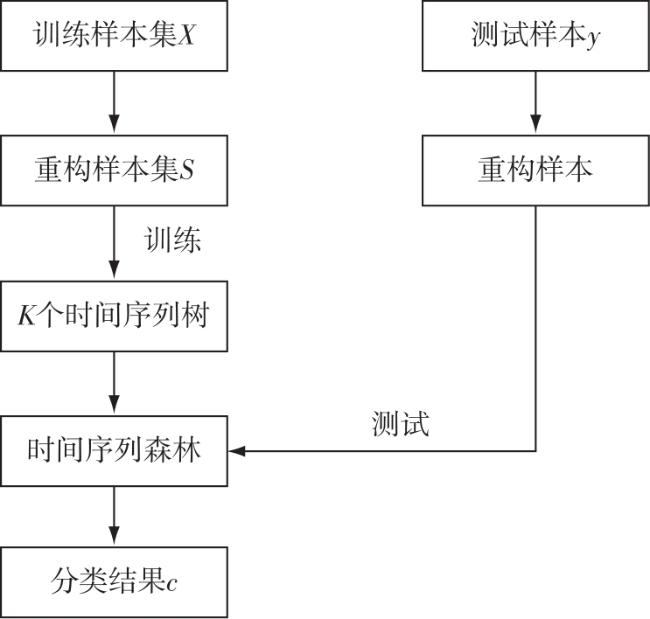
训练阶段:
1)对于HRRP训练样本集X=(X1,X2,…,XN),通过随机区间抽取和区间特征提取产生K个不同的重构样本集{Sk,k=1,2,…,K};
2)将Sk作为第k个时间序列树中决策树的输入,并采用Entrance增益作为分裂准则训练决策树:
① 在区间特征样本s中,随机抽取3m维特征中的L个特征作为分裂时的候选特征,s1、s2、…sL;
② 按照式(1)-(4)计算L个候选特征的Entrance增益,挑选Entrance增益最大的候选特征对决策树进行分裂;
③ 重复步骤,直到所有候选节点的Entrance增益小于预先设定的阈值τ,阈值的设定采用文献[19]中使用的方法,从候选阈值中选取最佳阈值。
3)重复步骤2,直到生成K个时间序列树。
测试阶段,使用TSF对待测试的样本y进行分类时,它的类别标签c=(1,2,…,T)由K个时间序列树投票决定,得票数最多的标签为样本y的类别,即:
c=arg (I(h(y,θk)=c))
I(A=B)=
式中,h(y,θk)为第k个时间序列树对样本y的分类结果,I(·)为示性函数,当(·)内事件成立时取值为1,不成立取值为0。K个时间序列树投票后得票数最高的标签c作为测试样本y的类别标签。
3 实验结果
3.1 数据介绍
为了验证本文提出算法的可行性,基于实测的雷达HRRP的数据进行了一系列的对比实验。本文所用的HRRP实测数据为某研究所公开发布的一组“安26”“奖状”以及“雅克42”三类目标的飞行数据,飞机的飞行轨迹在地平面上的投影如图5 所示,雷达和飞机的相关参数如表1 所示。
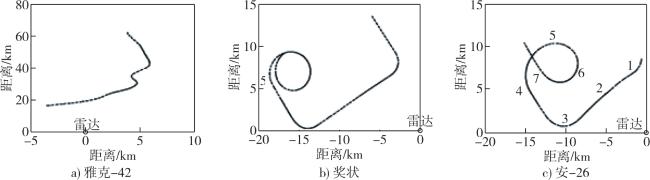
为了验证本文算法的推广能力,将HRRP数据集进行分段,并选取不同段的HRRP数据作为训练集与测试集。考虑HRRP数据集方位角域的对称性,只需要取方位角0°~180°范围内的训练数据即可,这个角域包含了目标的所有姿态角,称为完备角域数据集。以“安-26”飞机的第5段和第6段、“奖状”飞机的第6段和第7段、“雅克-42”飞机的第2段和第5段的HRRP数据集作为训练数据集,从每段数据中等间隔提取5 000个HRRP信号,每个飞机目标提取10 000个HRRP信号,从三类不同的飞机目标数据集中,共选取了30 000个HRRP训练样本。再从三类飞机其余飞行段等间隔各抽取1 000个HRRP信号,得到共计3 000个HRRP信号的测试集样本,HRRP信号的长度为256个距离单元。
为了测试算法对于不同信噪比下的数据的稳健性,需要对原始的HRRP实测数据进行加噪处理。由于对目标的采样数据中包含一定的噪声,可以通过在原始数据中添加不同水平的高斯白噪声,来模拟不同信噪比下的实测数据,提高识别模型的鲁棒性。在经过加噪处理后,再使用不同的分类算法对数据集进行实验验证,比较它们在不同信噪比下的识别性能。这样可以帮助我们评估算法对于实际应用场景中存在的噪声干扰的适应能力,以及对其进行改进和优化。信噪比SNR定义为
SNR=10×log10 =10×log10
式中, 代表信号的平均功率,PNoise表示噪声的平均功率,Psn为该信号中第n个距离单元上的功率大小,N为信号维度。
在后续实验中,分别在原始数据中添加了信噪比为10 dB至50 dB的高斯白噪声进行对比,研究噪声对算法精度的影响。
3.2 完备角域下的算法性能
实验中,为对比本文算法与目前HRRP目标识别研究中常用的机器学习分类器和深度神经网络的识别性能,分别使用KNN、SVM、RF三种经典机器学习分类器以及CNN和LSTM两种深度神经网络进行实验。
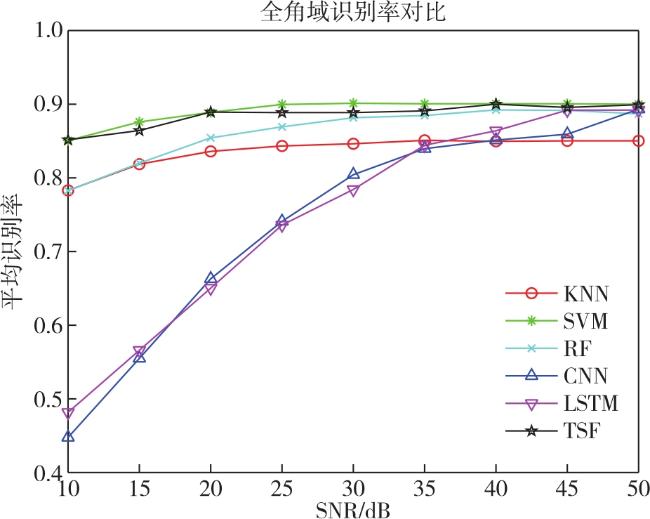
通过图6 的结果可以发现,在完备角域HRRP训练集下,传统机器学习算法相对于深度神经网络,具有更好的抗噪性能。这是因为传统机器学习算法的识别精度主要依赖于特征工程,即从原始数据中提取有效特征,再将这些特征送入分类器进行分类。而深度神经网络则是通过学习数据本身的特征来进行分类,这种方式有时候会受到噪声的影响,导致识别准确率下降。其中KNN算法采用经典的模板匹配方法,虽然整体识别率一般,但由于该算法简单易用,在某些场景下可以发挥作用。SVM算法引入了最优分类超平面的概念,识别性能有了较大的提升。RF算法在决策树的基础上解决了过拟合问题,且不需要多次交叉验证获取最佳参数,识别率较高。TSF算法在RF算法的基础上,利用了时间序列的区间特征,对于时间序列的识别性能更好。相比之下,深度神经网络算法CNN和LSTM可以自动提取样本隐藏特征,在高信噪比的情况下获得较好的识别性能,但在低信噪比情况下表现不如传统机器学习算法。在完备角域HRRP训练集下,相比于其他几种算法,SVM和TSF算法的识别性能最好。
3.3 不完备角域训练条件下的算法性能
在实际战场环境中,雷达HRRP目标识别的对象一般都是敌对的非合作目标,由于非合作目标的高机动性、超远距离、复杂环境等因素的影响,很难获取目标的全角域姿态角下的样本[20]。提出一种有效的目标识别算法,在处理不完备角域的训练数据集时表现更好,在实际作战环境中更有意义。该算法需要满足以下性能指标:能准确识别目标并具有很强的角域推广能力。
上一小节已经得到当训练样本为完备角域HRRP训练数据集时六种分类器的平均识别率,显然TSF算法拥有较优的识别性能。
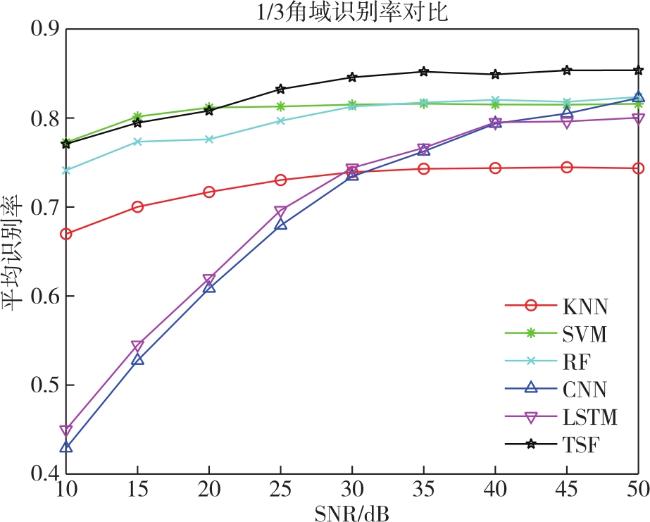
为了对比在不完备角域数据集下各类算法的识别性能,将训练集分别划分为1/2角域和1/3角域数据集(1/2角域数据集是指将训练集分为数量相同的两半,1/3角域是指将训练集分为等量的三部分),测试集为原测试集,为了更有效地测试不完备角域数据集,将划分后的训练集的不同部分分别输入各分类器中进行训练,得到不同信噪比下的平均识别率如图7 和图8 所示,其中信噪比在10 dB和50 dB时的平均识别率分别如表3 和表4 所示。
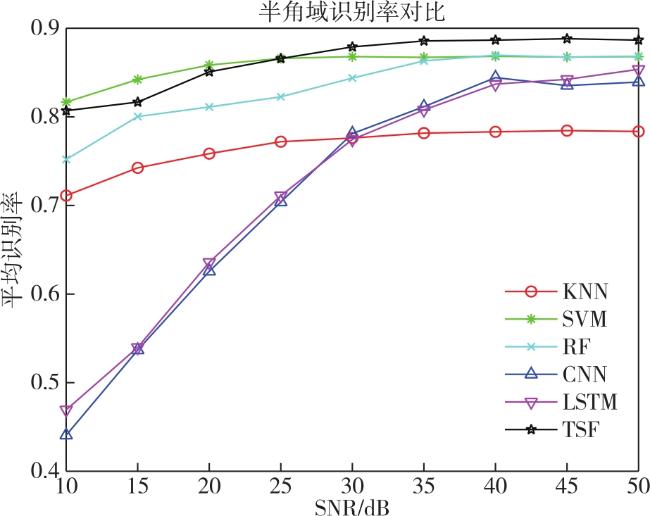
图7 1/2角域HRRP训练集下的识别率Fig.7 Recognition rate of HRRP training set in 1/2 angle domain |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
图8 1/3角域HRRP训练集下的识别率Fig.8 Recognition rate of HRRP training set in 1/3 angle domain |
表3 1/2角域平均识别率Tab.3 Average recognition rate of 1/2 angular domain |
| 平均识别率(10 dB)/% | 平均识别率(50 dB)/% | |
|---|---|---|
| KNN | 71.1 | 78.3 |
| SVM | 81.6 | 86.8 |
| RF | 75.2 | 86.8 |
| CNN | 44.1 | 83.9 |
| LSTM | 46.9 | 85.4 |
| TSF | 80.7 | 88.7 |
表4 1/3角域平均识别率Tab.4 Average recognition rate of 1/3 angular domain |
| 平均识别率(10 dB)/% | 平均识别率(50 dB)/% | |
|---|---|---|
| KNN | 66.9 | 74.3 |
| SVM | 77.2 | 81.6 |
| RF | 74.1 | 82.3 |
| CNN | 42.9 | 82.2 |
| LSTM | 45.0 | 80.0 |
| TSF | 77.1 | 85.4 |
实验结果显示,本文算法对不完备角域HRRP数据集的识别性能要优于其他五种分类器,当只有1/3角域的HRRP训练数据集时,依然有着85.4%的平均识别率。
研究分析了六种算法在不完备角域数据集上识别性能有所差异的本质原因。针对KNN算法,模板质量是影响分类精度的重要因素,当只有部分角域数据作为训练样本,模板库的模板角域不全,影响了分类精度,导致识别率较低。对于SVM算法,它寻找的是最优超平面,具有一定的推广能力,对于1/2角域训练样本识别率下降较少,但随着角域范围进一步下降,缺少有效的支持向量,难以寻找最优超平面,因此识别率下降较大。RF算法采用Bagging算法将多个弱分类器融合为一个强分类器,缓解了过拟合问题,但是,由于没有考虑HRRP的时序特性,在一定程度上限制了其识别性能。对于CNN和LSTM两种神经网络,它们更依赖优质的训练数据集,推广能力有限。最后,本文提出的基于TSF的HRRP目标识别算法,在RF算法的基础上,考虑了HRRP的时序特性,提取了HRRP信号的区间特征(均值、标准差、斜率),具有更好的角域推广能力,因此可以提高识别性能。
4 结束语
本文针对实际战场环境中难以获取非合作目标完备角域HRRP数据集的情况,提出了基于时间序列森林的HRRP目标识别算法,该算法在RF算法的基础上,考虑了HRRP的时序特性,提取了HRRP的区间特征,得到了更好的识别性能,实验结果表明,相比于KNN、SVM、RF、CNN和LSTM等经典识别算法,本文提出的算法不仅在完备角域HRRP训练集下具有较高的识别性能,还具有更好的角域推广能力,在只有不完备角域数据集的情况下对目标具有更高的识别精度,更加贴近实际战场环境的需要。