
 中国指挥与控制学会会刊
中国指挥与控制学会会刊 近年来,无人机(unmanned aerial vehicle, UAV)技术迅猛发展,搭载着高分辨率光学相机、红外热成像仪、合成孔径雷达(synthetic aperture radar, SAR)等先进传感器,为采集目标区域数据提供了强大支持。无人机以其出色的灵活性、机动性以及相对较低的成本,在军事侦察[1]、农业管理[2]、搜索救援[3]、交通监控[4-5]等多个领域发挥着重要作用。无人机所获取的视频产品极大地丰富了我们对感兴趣区域及目标在空间和时间上的信息,使得基于无人机的目标检测技术成为学术界研究的热点。
无人机装备了多种传感器,各自对应不同的目标特性和挑战。因此,目标检测策略必须融合传感器特性、数据处理、目标属性和环境条件,以适应多变的任务需求和挑战。传统框架下,无人机通过传感器收集数据,并通过一系列步骤如预处理、特征提取、目标检测,实现实时监控。随着AI和机器学习技术的发展,这些方法正变得更加自动化和智能化。本文综述了基于无人机的检测算法,从传统方法和深度学习角度,重点概述了无人机利用红外、光学和视频SAR影像的目标检测方面的技术进展和关键成果。
1 基于无人机载荷的目标检测方法
1.1 目标检测方法概述
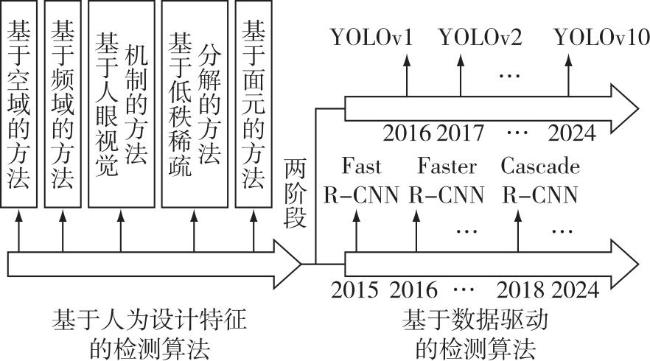
目前基于无人机载荷的目标检测方法可以分为基于人为设计特征的方法和基于数据驱动的方法。常见的手工制作特征包括几何特征、纹理特征、矩特征、扫描统计特征、尺度不变特征和方向梯度直方图(histogram of oriented gradients, HOG)特征等。经典的基于人为设计特征的目标检测算法有基于空域、频域、人眼视觉机制、低秩稀疏分解(low-rank plus sparse decomposition, LRSD)以及面元模型的方法,这些算法使用一种或几种人为设计的特征来描述目标,原理直观,但由于人为设计特征本身的局限性,提取的图像特征相对单一,使得算法的可迁移性较弱、泛化能力较差。
基于数据驱动的方法通过大量的训练数据中自主学习目标特征表示,最具代表性的就是基于深度学习的检测方法。近两年,已经有很多基于深度学习的无人机运动目标检测的综述:2023年,罗旭东等[6]综述了近十年无人机航拍影像目标检测与语义分割的深度学习方法,包括其发展历程、不同网络模型的方法分类及改进策略等;2024年,陈金林等[7]总结了YOLO(you only look once)系列算法的发展历程等,并梳理了无人机视角下目标检测YOLO系列算法的研究与应用成果;苑玉彬等[8]综述了基于深度学习的无人机航拍视频多目标检测与跟踪算法;吴一全等[9]综述了基于深度学习的无人机航拍图像小目标检测研究进展。基于深度学习的方法从特征图的处理过程角度可以分为两大类,分别是R-CNN(region-based convolutional neural network)系列为代表的基于候选框(region proposal)的两阶段目标检测算法[10]和以YOLO系列为代表的基于回归方法的单阶段目标检测算法[11]。图1为基于无人机载荷的目标检测算法分类图。
{kind=link}
{kind=link}
1.2 红外目标检测
无人机搭载的红外成像系统能捕捉目标的红外辐射并转化为热图像。相比可见光成像,它不受天气和光线影响,可在夜间或低能见度环境中工作,侦察到复杂隐蔽环境中不易发现的目标。红外目标的特性可以总结为以下3个关键特征:首先,目标尺寸通常非常小,有时甚至表现为点状目标。其次,目标的灰度值在局部邻域中往往较高,从而在背景中形成了明显的亮度对比。最后,在包含复杂背景和噪声的环境中,目标的信噪比通常较低。鉴于上述特性,利用无人机载荷在复杂动态场景中进行红外目标检测的主要难点包括:目标尺寸细小、结构信息和纹理特征较弱,检测难度增加;目标尺度变化较大,且容易受到背景中相似目标和杂波的干扰,进一步增加了检测的难度;此外,还必须考虑目标可能遭受的严重遮挡,热晕效应、大气衰减等复杂干扰因素,以及无人机搭载的硬件条件有限的现实因素等,这些都对红外目标的实时检测构成了重大挑战。因此,目前利用无人机载荷的红外图像数据进行目标检测的主要问题之一是如何在复杂背景下对多尺度微小红外目标进行检测。
针对该问题,学者们主要采用基于人为设计特征的算法和基于深度学习的算法,通过增强目标和抑制背景,提高对红外目标的检测性能。基于人为设计特征的红外目标检测方法有很多,例如基于空域处理的代表性方法有均值滤波器[12]、中值滤波器[13]、形态学滤波器(Top-hat)[14]等。这类方法通过计算原始图像与预测背景之间的差值来增强小目标,计算速度快、计算复杂度低,但需要较高的图像信噪比,且仅适用于简单且均匀的背景;基于频域处理的代表性方法有小波变换[15]、频域高阶统计量[16]、谱尺度空间[17]等,此类方法易受复杂动态背景噪事干扰;基于人眼视觉机制的代表性方法有LCM(local contrast measure)[18]、ILCM(improved local contrast measure)[19]、NLCM(novel local contrast method)[20]、MPCM(multiscale patch-based contrast measure)[21]、RLCM(relative local contrast measure)[22]等,这些方法的局限性在于,在某些背景突出的情况下,显著性图上的杂波和目标可能具有相似的特征且难以区分,从而降低了目标检测性能;基于低秩稀疏分解的代表性方法有基于矩阵的方法[23-24]、基于张量的单帧方法[25-26]及多帧方法[27]等,这类方法适用于几乎所有复杂、迅速变化的背景,但基于多帧的低秩稀疏分解方法有些耗时,不能充分挖掘红外序列图像的时空特征;基于面元模型的代表性方法有FODD(first-order directional derivative)[28]、SODD(second-order directional derivative)[29]、DECM(derivative entropy-based contrast measure)[30]等,这类方法在一定程度上会受到目标形状、尺寸、边缘复杂性以及噪声等因素的影响,如FODD对噪声敏感且具有方向依赖性;SODD计算复杂度高且对边缘细节过度敏感;DECM存在熵估计不稳定以及对目标形状和尺寸适应性差等问题,从而影响其在复杂环境下对目标的准确检测能力。表1对基于人为设计特征的无人机载荷红外目标检测方法算法进行了分析总结。
表1 基于人为设计特征的无人机载荷红外目标检测方法总结Tab.1 Summary of infrared target detection algorithm for UAV payloads |
| 类别 | 代表性方法 | 文献 | 特点 | 局限性 |
|---|---|---|---|---|
| 均值滤波器 | [12] | 计算速度快,计算复杂度低 | 需要较高的图像信噪比,仅适用于简单且均匀的背景,复杂背景或干扰条件下性能差 | |
| 基于空域处理 | 中值滤波器 | [13] | ||
| 形态学滤波器(Top-hat) | [14] | |||
| 小波变换 | [15] | 对复杂动态变化背景中的噪声敏感 | 目标快速移动或变形情况下算法适应性较差 | |
| 基于频域处理 | 频域高阶统计量 | [16] | ||
| 谱尺度空间 | [17] | |||
| 基于人眼 视觉机制 | LCM | [18] | 利用人眼视觉机制进行目标检测 | 背景突出时杂波和目标特征相似,难以区分,降低检测性能 |
| ILCM | [19] | |||
| NLCM | [20] | |||
| MPCM | [21] | |||
| RLCM | [22] | |||
| 基于低秩 稀疏分解 | 基于矩阵的方法 | [23-24] | 适用于各种复杂、迅速变化的背景,利用部分时空特征信息 | 多帧方法耗时,时空特征信息利用不充分 |
| 基于张量的单帧方法 | [25-26] | |||
| 基于张量的多帧方法 | [27] | |||
| FODD | [28] | 对于某些特定类型的图像背景具有较好的检测效果 | 复杂环境下算法适应性低 | |
| 基于面元模型 | SODD | [29] | ||
| DECM | [30] |
近些年,国内外的研究主要采用基于深度学习的方法实现对无人机红外多尺度微小目标的检测。深度学习虽然可以提高目标检测性能,但它们面临红外小目标缺乏形状特征和显著的纹理且目标尺度变化大的挑战,这使得特征学习很困难,进而导致经典的深度学习检测方法(如Faster RCNN、YOLO系列)在红外弱小目标检测中效果不佳,因此,学者们以基于深度学习的方法为主体,配合各类增强与改进模块,针对性解决问题,提升性能以适应该任务。例如文献[31]将小目标视作一种特殊的噪声,采用生成对抗网络模型自动学习红外小目标的独特分布特征后将目标从输入图像中分离。文献[32]提出了ALCNet结合模型驱动和数据驱动方法,先通过骨干网提取高级语义信息,再用传统局部对比度方法编码,并通过自下而上的注意力机制将底层特征完全融合到高层特征中,既解决了模型驱动方法的参数敏感问题,也缓解了数据驱动方法的最小固有特征问题。梁晓等[33]提出了基于YOLOv7的检测算法,该算法结合了通道和空间双重注意力机制,可以有效提高弱小目标的表征能力。文献[34]将红外小目标检测问题转化为残差图像重建问题,构造了一个扩张残差全卷积自编码器网络DRU-Net 来表征和重组残差图像中的多尺度特征信息,实现了对红外多尺度目标的检测。
1.3 光学目标检测
无人机搭载的光学成像系统通过捕捉目标物体发出或反射的光线生成高分辨率图像。在光照条件良好时,这一系统能够提供清晰的成像效果。但是,当遇到飞行高度变化、光照条件不稳定、背景复杂等情况时,目标(飞机、车辆、船舶等)的尺寸可能会显得较小,多目标密集排列、尺度变化较大、目标旋转或被其他物体遮挡等因素均可能增加光学目标检测的难度。因此,目前利用无人机载荷的光学图像数据进行目标检测的主要问题之一是如何在极端条件下对低分辨率图像中多尺度旋转小目标进行检测。
为了解决该问题,学者们基于通用目标检测算法加以改进以适应无人机航拍光学图像的特点,这些改进方法也可以分为基于人为设计特征的方法和基于数据驱动的方法两大类。基于人为设计特征的光学目标检测方法有很多,在最近的研究里,针对不同光照条件下的目标检测问题,文献[35]模仿鹰眼的视觉适应机制,建立了眩光适应、暗光适应、颜色适应和背景适应的数学模型,并基于建立的数学模型提出一种生物鹰眼视觉适应方法,实现了在不同场景(如耀眼、多云、黄昏等)中对海事小目标的有效检测。然而,基于人为设计特征的光学目标检测方法通常需要复杂的人为特征提取,并且不能适应环境的变化。
(1)多尺度目标检测
针对多尺度目标检测任务,由于基于数据驱动的检测网络在多次特征池化后,容易丢失小目标信息,针对这一问题,采用多尺度特征融合策略,即通过增强多尺度特征并融合其上下文语义信息。例如文献[40]在Faster R-CNN架构中引入了一个层筛选滤波网络(hierarchical selective filtering layer,HSF),将不同尺度的特征嵌入到同一特征空间,通过不同尺寸的卷积核处理不同尺度的锚点(anchors),以提取大尺度目标的形状信息,而不是局部细节信息。文献[41]利用FPN网络结构融合高分辨率的低级特征图与富含语义信息的高级特征图,文献[42]利用扩张卷积的特性,调整扩张率以控制感受野大小:小扩张率适合捕捉小物体或细节,大扩张率提供更可靠的大物体或整体上下文信息。研究首先在级联残差网络中应用了多扩张率的卷积,以捕获多尺度的上下文信息。随后,融合在不同扩张率下捕获的特征,形成一套增强的特征集,以提升模型的目标识别和理解能力。
注意力机制被广泛应用于提升网络对目标特征的聚焦能力,减少无关信息干扰。例如文献[43]提出了HFPNet网络结构,通过特征增强模块(FEM)和多尺度特征聚合模块(MFM)协同工作,提高了光学海洋小目标的检测精度,其中,FEM通过通道和空间注意力机制增强小目标特征并降低背景干扰。文献[44]提出的AMFLW-YOLO网络先是在特征融合层引入的坐标注意力机制强调了通道和位置信息,提高了网络对正样本的注意力,减少了对环境无关信息的关注;随后在双向特征金字塔网络(BiFPN)结构下进行多尺度特征融合,最终提高了多尺度目标的检测准确率。利用拉普拉斯核有助于突出图像中的小目标或弱特征,而多尺度卷积层则能够捕获从浅层到深层的多尺度特征的特性,文献[45]通过提出一种包含多尺度增强网络和尺度不变回归层的全尺度目标检测网络FSoD-Net,其中MSE-Net集成拉普拉斯核与较少的并行多尺度卷积层,增强了对不同尺度目标的描述能力。文献[46]提出了一种基于改进YOLOv8的LAR-YOLOv8算法,通过引入双分支架构注意力机制的局部模块增强、基于视觉转换器的特征图表示最大化、注意力引导的双向特征金字塔网络,动态地调整注意力权重,有效提升了多尺度目标的检测精度。
基于知识蒸馏的方法也已经被引入光学目标检测领域,以提高多尺度目标检测性能,例如文献[47]提出了一种名为“Two-Way Assistant”(TWA)的知识蒸馏方法,在压缩助理模块(CPAM)中通过对教师模型的特征进行压缩和重新分配,减少背景信息和类别干扰,将处理后的特征传递给学生模型,从而帮助学生模型更好地聚焦于目标特征,再在多尺度自适应助理模块(MAAM)进行多尺度特征融合以增强特征知识,从而最终优化光学目标检测性能。
(2)极端条件下的目标检测
针对在低光照和强遮挡等极端条件下的目标检测问题,文献[48]提出了一种创新的跨模态目标检测网络CRSIOD,该网络通过融合可见光和红外图像特征,并引入照明感知模块和不确定性感知模块,显著提高了检测的准确性和鲁棒性。文献[49]提出了一种边缘引导的递归定位网络(ERPNet),该网络通过边缘感知位置注意力单元(EPAU)有效地结合了光学图像和红外图像多模态特征,以实现对显著对象的精确检测。针对多模态遥感数据中单一模态数据不可靠导致的性能下降问题,文献[39]提出了一种新的融合特征优化检测网络,首先在联合表示优化模块中,根据特定的优化策略(如注意力机制、特征选择等)增强目标相关的特征并抑制那些对检测任务不利的冗余和干扰特征,获得融合的目标特征,再进一步通过特征变换、特征放大等进行特征增强,最终显著提升了多模态目标检测效果。
(3)低分辨率图像中的目标检测
针对低分辨率图像中特征缺失条件下的光学目标检测问题,文献[50]利用YOLOv8s6的目标特征提取器提取的高分辨率特征作为监督信号,进行对抗性GAN训练后获得高分辨特征生成器,使其能够直接从低分辨率图像中提取超分辨率特征,最终同时实现了特征提取和特征增强。
(4)任意方向目标检测
针对目标方向不同条件下的检测问题,文献[51]设计了双分支回归网络(dual-branch regression network)分别预测船只的方向和其他变量(如中心位置、宽度、高度),并通过形状自适应池化和多级自适应池化,改善了特征提取过程中的不均匀采样问题,提高了旋转边界框的准确性,使得生成旋转边界框更准确,有效减少误检和漏检。针对传统的基于水平边界框的检测方法会导致目标间相互覆盖的问题,文献[52]提出了一种结合霍夫(Hough)变换与水平边界框检测网络的新检测器HODet,依次通过水平边界框检测网络、基于霍夫变换的旋转角度预测、图像旋转与二次检测、坐标映射等操作,结合中心点偏移策略,显著提高了对任意方向矩形目标的检测性能。
(5)小目标检测
针对无人机光学小目标检测任务,文献[53]在YOLOv5s检测器中使用了跨阶段多头注意力机制(cross-stage multi-head attention,CRMA)模块,该模块利用自注意力机制捕获更丰富的上下文信息,并对来自不同头的注意力输出进行融合,最终提高对目标特征的辨别能力。然而,由于自注意力操作的计算成本是O(n2),导致推理速度变慢。为了解决这个问题,文献[54]提出了一种无需注意力机制的全局多尺度融合网络AGMF-Net,该网络通过引入空间偏差模块和全局信息提取模块,避免了计算成本高昂的自注意力机制,有效提升了检测目标的推理速度。文献[55]提出了一种新颖的轻量级框架HSIShipDetectionNet,该框架通过结合高阶空间交互(high-order spatial interaction,HSI)模块、引入预测微小船只的分支以及设计轻量级混合注意力块LHAB,实现了基于光学遥感图像的小船只检测。
综上所述,通过这些创新策略的融合与应用,光学目标检测技术在处理多尺度目标、极端条件、低分辨率图像以及任意方向目标检测等方面均取得了突破性进展,为实现更高效、更准确的目标检测提供了强有力的技术支撑。
1.4 视频SAR目标检测
合成孔径雷达(SAR)技术因其全天候、高分辨率成像特征而广泛应用。在高帧率视频SAR图像中,运动目标的能量会因位置偏移导致散焦现象,形成离焦阴影。这些阴影不仅反映目标真实状态,还因不受畸变效应影响,能稳定呈现。目标阴影的对比度与雷达散射截面(radar cross section, RCS)无关,意味着隐身目标的阴影也无法减少或消除,这成为SAR目标检测的优势。因此,运动目标阴影特性及相关检测方法成为研究热点之一。此外,当动阴影不明显时,还可通过散焦后的亮线(能量)特征进行目标检测[56]。
基于无人机载荷的视频SAR 动目标阴影检测面临弱小目标、复杂背景和多种杂波与噪声干扰等诸多挑战。首先,SAR 图像中动目标真实位置处的阴影区域像素点有限,一般远小于自然图片中物体的尺寸,参考学术界对光学/遥感图像中“小目标”的绝对尺寸[57]定义,即小目标像素点数小于32×32,通过对美国桑迪亚实验室公布的两个SAR 视频中阴影区域手动标记的尺寸进行统计发现,约91% 的目标阴影像素点数小于32×32,因此SAR 视频中“小目标”阴影占比较大。其次,动目标阴影区域的强度较低,特征不明显,仅有边缘信息和少量甚至缺失的纹理信息,人眼视觉系统很难将这些小目标从单帧图像中分辨出来。再次,视频SAR 在执行侦察任务时,受观测场景的复杂地貌等因素影响,拍摄的视频序列具有背景复杂的特征。最后,视频SAR 目标检测过程中存在各种杂波噪声干扰,如运动目标成像能量移位和散焦造成的杂波、背景强杂波、相干斑噪声、背景特征纹理噪声等,具有信杂噪比小、噪声分布广的特点。基于以上分析可知基于视频SAR图像序列的动目标阴影检测是一个典型的弱小目标检测问题。
国内外学者们针对机载视频SAR 动目标检测提出了多种方法,主要包括帧间/背景差分法、恒虚警检测(constant false alarm rate,CFAR)算法、图像分割法、低秩稀疏分解法、光流法(optical flow method)以及基于深度学习的方法等。
帧间/背景差分动目标检测方法通过多帧积累静态背景信息进行建模和重建,消除静态地物影响后,结合运动目标的几何和统计特征,实现目标检测。例如,何志华等[58]基于背景差分结果和对称差分结果的并集结果,采用形态学滤波和灰度阈值处理,获得动目标阴影最终检测结果。帧间/背景差分法检测目标准确性高,且检测速度快,是一种有效的目标实时检测算法。然而,由于视频SAR平台与观测区域相对运动,雷达视角变化会导致动态背景伪影,干扰弱小目标的检测。
图像分割检测方法结合特定场景背景信息和运动目标的几何、统计特性,实现目标与背景的分割,以进行运动目标检测,其中,最大类间方差法(OTSU)由日本学者大津于1979年提出,该算法根据前景与背景图像的类间方差最大的原则确定分割阈值,并对图像进行二值化分割。文献[62]建立了一个无需几何先验知识的视频SAR目标信息(高度等)提取框架,具体包括重叠子孔径成像、去噪、基于OTSU的图像分割、视距(light-of-sight,LOS)几何匹配、形态学处理以及高度反演等。针对视频SAR图像中目标存在虚影的问题,文献[63]提出了一种单帧阴影检测算法,算法步骤包括OTSU阈值分割、形态学操作、连通域筛选、局部信杂比筛选等步骤。
上述基于CFAR和图像分割的运动目标检测方法可以在单一场景(如道路、海面)中利用背景信息,根据运动目标的统计或几何特征进行检测。然而,在视频SAR复杂背景观测场景中,背景包含简单均匀地物的情况较少,运动目标统计特征不明显,且静止物体成像也有清晰的轮廓和阴影,使得运动目标与背景的区分度低,基于CFAR和图像分割技术的方法难以可靠地检测运动目标。
低秩稀疏(low-rank plus and sparse decomposition,LRSD)分解法是近年来流行的背景重建与前景分割方法,能有效处理动态背景,因而受到广泛关注。该方法通过将动态背景建模为低秩分量,前景建模为稀疏分量,利用最优化方法重建背景和前景。LRSD技术常用于光学视频中动态目标的检测,尤其是高信噪比的场景。在视频SAR图像中,LRSD主要用于检测信噪比较高的动态目标。如文献[64]针对正侧式视频SAR非线性运动(有方位向加速度的)目标检测问题,将背景建模为低秩矩阵,散焦车辆目标能量建模为稀疏矩阵,噪声杂波等建模为扰动矩阵,通过求解LRSD模型获得目标位置。文献[65]针对圆迹视频SAR目标检测问题,在LRSD分解过程中通过自动补偿校正由于场景旋转和平台运动等造成的相位误差,获得静态背景和散焦目标成像。此外,LRSD技术也被用于图像预处理步骤中,例如文献[66]利用LRSD分解技术对视频SAR图像序列进行预处理以提高目标阴影的对比度,进而提高目标检测精度。
以上传统方法在早期目标检测研究中发挥了重要作用,但需要专业知识设计特征提取器,且泛化能力有限。近年来,基于深度学习的方法在视频SAR目标检测中也被广泛应用,它们通过自动特征学习简化了专业技能需求,提升了对复杂图像场景的处理能力。学者们针对数据样本短缺[70]、小目标检测[71]等问题,使用的深度学习目标检测网络包括Faster RCNN[72-75],YOLO[76],实时递归(real-time recurrent regression,mRe3) 神经网络[77],基于注意力机制的神经网络[78-79]等。例如,针对SAR图像的斑噪声和训练样本短缺问题,文献[70]提出了一种自监督学习算法。该算法首先使用SAR2SAR深度学习去噪,然后通过对抗式自动编码器重构背景,最后利用背景与去噪图像之间的协方差矩阵的Frobenius-范数距离来检测运动目标。邱磊等[71]为了提升SAR图像目标检测性能,引入了增强特征和多尺度特征金字塔,设计了特征融合策略,并采用了轻量级EfficientDet网络来检测SAR图像中的目标。这些方法展示了深度学习在解决基于无人机载荷的视频SAR目标检测问题中的潜力和灵活性。
2 未来研究展望
未来的无人机将配备更先进的算法,以应对日益复杂的数据分析任务,实现在多样化环境和条件下对目标的高精度检测。
(1)跨模态目标检测技术:不同传感器各有所长,也各有局限。单一传感器(如可见光、红外、SAR等)所提供的数据可能不足以应对所有复杂场景。通过融合多模态数据,不仅可以弥补单一传感器的不足,还能更全面地理解复杂环境,从而显著提升目标检测的准确性与稳定性,特别是在光照变化、遮挡或背景干扰等条件下。在最近的研究中,针对以往的目标检测算法通常针对单一特定领域设计,文献[80]联合了多级领域分类网络和领域中心裁剪粘贴模块分别进行领域不变特征学习和伪中间领域样本监督信息的数据增强,提出了一种能够在多个领域中有效工作的通用船舶检测器。文献[81]提出了一种基于置信度驱动的区域混合框架,该框架通过结合区域选择性混合策略和无偏对抗模块,有效地解决了光学遥感图像在不同数据分布下的无监督域自适应对象检测问题,提高了检测模型的泛化能力和准确性。因此,跨模态目标检测技术需要关注通用性、泛化能力和准确性等因素。
(2)智能化检测系统的构建:在数据驱动的时代,决策者需要实时、准确的数据来做出明智决策,智能化无人机系统能够提供这种数据支持[82]。尤其在紧急情况和快速变化的环境中,对实时数据处理和快速响应的需求不断增长,这种背景下,迫切需要构建能够实时分析大量传感器数据的智能化无人机系统,以实现对目标的有效检测。文献[83]提出的基于脑-机接口的无人机目标混合智能检测系统,通过结合深度学习检测算法和基于统计理论的增强事件相关电位成分算法,构建了一个有效的联合决策框架,不仅可以优化无人机的飞行参数,还可以充分利用多传感器信息提高事件相关电位检测效率并抑制干扰成分。同时,构建无人机智能化检测系统还需要考虑能源消耗。文献[84]提出的E3-UAV系统,正是为了满足这一需求而设计的,它是一个基于边缘计算的能源高效目标检测系统,能够通过优化飞行参数(包括飞行高度、飞行速度、检测算法和采样率)来最小化能源消耗,同时满足多样化的检测任务要求。综上,未来的智能化无人机检测系统需要在保证高准确性和快速响应的基础上,进一步考虑能源效率和系统的可持续性。
(3)超大模型能力的提升:超大模型具有数据容量庞大、计算能力强、成本低(多种任务共享一个模型)、数据泛化性高(以各种数据作为训练输入)、行为预测能力强等特点,这将为无人机在复杂多变的环境中进行目标检测提供更高精度和适应性的可能。然而,现实世界场景的复杂多变要求大模型具备强大的学习能力,以理解和适应这些复杂场景,并提供全面的情境感知。提升超大模型能力需要关注计算复杂度和检测速度等因素,并在检测精度和运算速度之间做到良好的平衡。如何在保持甚至降低模型复杂度的同时提升检测精度是一个充满挑战的研究。文献[85]提出的YOLOv5-mamba检测网络是一个显著的进步,它通过引入YOLOv8的C2f和Mamba模块来强化特征提取,并结合双向反馈和自适应门控融合策略,显著提升了检测精度,同时保持了较快的运算速度。随着Transformer、Mamba、SwinLSTM等的发展和应用,基于无人机载荷的多任务(视觉目标检测、语义分割、目标跟踪等)超大模型成为了可能。总之,未来的研究需要继续在超大模型的优化、特征提取技术的提升以及多任务处理能力的开发等方面进行深入探索,以实现无人机目标检测系统的全面升级和性能飞跃。
3 结束语
本文综述了基于无人机载荷的目标检测技术的最新进展,并展望了跨模态融合、智能化系统构建和大模型能力提升等未来研究方向。尽管深度学习技术在提高检测准确性方面取得了显著成就,但仍需解决泛化能力和训练样本依赖等挑战。随着技术的持续进步,预计无人机目标检测技术将更加成熟,为多个领域提供强有力的支持。