
 中国指挥与控制学会会刊
中国指挥与控制学会会刊 在未来两栖作战中,精确的目标指示信息配合信息化炮弹,将极大提升海军水面舰艇的作战能力。在战场环境变化更快、影响因素更多的情况下,由2-5人组成的战术分队,携带小型目标定位装置,就可以完成对战场临时目标的定位,尤其是突然出现的小型、快速的目标/目标群,并能够迅速召唤舰炮制导炮弹的火力打击。美军在伊拉克战争中多次使用“龙眼”小型无人机对敌方区域进行隐蔽侦察,为己方部队提供可靠的目标探测支援,减少了侦察兵的伤亡[1⇓-3]。
因而如何利用无人飞行平台获取高精度的目标位置信息,对水面舰艇能否及时对目标实施火力打击至关重要。尤其当卫星通信条件恶劣,无人机GPS定位信号弱的情况下[4-5],如何解决目标精确定位的问题,是本文研究的重点。模拟RGB-D(RGB-Depth)图像传感器的成像原理,在小型无人机光电吊舱内集成共轴的CCD(Charge-coupled Device)相机和测量距离更远的激光成像雷达,从而获取目标的位置信息。关于单无人机目标定位方法主要是纯方位定位,通过最小二乘无源定位的方法确定目标位置[6⇓⇓⇓⇓⇓⇓⇓⇓-15],本文在此基础上建立无人机侦察模型,对无人机定位过程中的误差进行分析,为CCD相机与激光成像雷达相结合的小型单无人平台目标定位的技术可行性提供理论支撑,为满足未来两栖作战样式的改变提供依据。
1 单无人平台侦察定位模型
传统的单无人机携带光电吊舱进行目标定位过程,主要是从不同的角度对目标所在区域进行扫描,计算无人机在不同位置时与目标之间的角度,通过运动学原理进行无源定位。但该方法没有考虑到目标与飞行平台之间的运动关系,而且对无人机自定位的精度有较高的要求。本文建立的定位模型,主要是对目标进行瞬时的捕获,并通过图像中一些显著的地表参照物进行坐标系之间的转换,最终得到目标与火炮发射舰之间的坐标关系,提供舰炮武器系统所需的射击诸元。
1.1 坐标系描述
单无人平台目标定位过程中涉及多个坐标系,主要包括:
1)以无人机质心为坐标系原点,y轴指向无人机位移的水平方向,z轴指向天顶,x与z轴和y轴构成右手直角坐标系,建立无人机航迹坐标系CV;
2)与无人机航迹坐标系共原点,坐标系旋转(ψ,θ,ϕ)得到无人机坐标系CV';
3)以参照物质心为坐标原点,z轴垂直原点指向天顶,y轴沿原点的经线的切线指北,x轴沿原点纬线切线指东,建立地理参考系CW。
本文所涉及地理参考系原点主要为火炮发射舰或地标参照物。
1.2 坐标系转换
无人飞行平台、目标以及地面参考坐标的位置关系如图1 所示。
图中,OV表示CV的原点,OV'表示CV'的原点,OP表示目标,OF表示以火炮发射舰,OW表示地面参照点,其经纬度信息可通过卫星遥感地图或炮兵地图进行确认。(ψ,θ,ϕ)表示无人平台的偏航角、俯仰角、横滚角。其中,ψ偏东方为正,偏西方为负;θ在水平面以上为正,水平面以下为负;往右横滚则ϕ为正,往左横滚则ϕ为负。
目标在火炮发射舰舰艇参考系下的位置可以通过无人机作为中继,并通过地图上的已知坐标转换得到:
MVP(目标在CV'中的相对位置)和MVW(地图上已知点在CV'中的相对位置,即CW的原点OW)通过无人机传感器探测得到,MFW(OW在CF中的坐标)也可在战前侦察计算得到。
2 无人机侦察定位模型误差分析
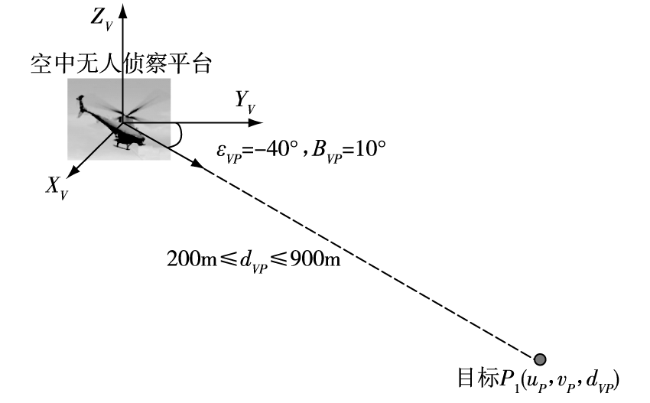
图中P表示目标实际位置,xyz-O坐标系表示无人机航迹坐标系CV。uv-o坐标系表示激光成像雷达生成的深度图像坐标系,o为坐标系原点,位于图像中心,p点则表示目标在深度图像中的位置,可以通过共轴的电视图像画面得到其像素坐标。目标P相对于探测平台的直角坐标系坐标MVP(xVP,yVP,εVP)可以表示为
式中,dVP表示目标距离。BVP、εVP分别表示目标与无人机之间的方向角和高低角,目标在无人机航向右侧为正(- ≤BVP≤ ),由于该模型仅对地面侦察,因此,目标与无人机的高低角- ≤εVP≤0。此时,无人平台计算得到的目标位置坐标MVP是在当前无人机没有位姿误差情况下得到的。当无人机存在位姿误差时,位置应修正为
(δψ,δθ,δϕ)表示陀螺仪的随机误差,(ψVP0,θVP0,ϕVP0)表示无人机的初始姿态角,BVP'和εVP'表示载机通过光电侦察设备测得的目标方向角和高低角。
同理,地表参照物相对于载机平台的坐标可以表示为
式中,dVW表示目标距离,可通过激光成像雷达测得。BVW、εVW分别表示目标与无人机之间的方向角和高低角,且
BVW'和εVW'表示地面参照物与无人机的方向角和高低角。
2.1 载机与目标之间的方向角和高低角
影响定位精度的还有传感器指向角度及其误差。设(αS,βS)表示传感器的横滚和纵摇,(ΔαS,ΔβS)表示其横滚误差和纵摇误差,传感器指向载机前进方向的右边为正,载机与相关坐标点的位置关系如图3 所示,图3 (a)为顶视图,用于方位角的计算,图3 (b)为左视图,用于高低角的计算,其中,BVW、εVW表示地面参照物相对于载机平台的高低角和方位角。
由上图可知地面参照点相对于载机平台的方向角和高低角为
目标相对于载机平台的方向角和高低角为
2.2 载机平台的旋转与位移
无人机的移动通常是一个累积的过程,在无人机GPS不可用或者GPS定位精度不高的情况下,可以根据飞行记录文件对其进行位姿估计。
多旋翼无人机通过远程遥控进行三轴坐标系的加速度运动,如图4 所示,载机平台的旋转向量可以分别分解为X,Y和Z轴方向上的转动向量,图中aX(t0)、aY(t0)和aZ(t0)表示各个方向上在t0的加速度向量大小,经过ti时间后,各加速度向量方向旋转至aX(ti)、aY(ti)和aZ(ti),t0时刻和ti时刻各方向上的加速度大小相同。 (t0,ti)、 (t0,ti)和 (t0,ti)表示无人机平台在(t0,ti)内X、Y和Z轴的转动向量(0≤i≤j),g表示重力加速度。
无人机在X轴、Y轴和Z轴上的所受力的作用,即无人机在左右横移、前进/后退、爬升/降落的瞬时速度,可以表示为各方向上加速度在(t0,tj)时间内的累积,分别为VX、VY和VZ,可表示为
其中,aX、aY和aZ是无人机的性能参数,为已知,( , , )表示在t0时刻无人机的速度分量。无人机在三个坐标轴方向上的加速度与重力加速度、姿态角速度之间的关系如下:
根据式(9)可计算出俯仰角速度Δθi和横滚角速度Δϕi为
将式(10)代入式(9)的aZ中,得到无人机爬升/降落的加速度aZ为
aZ=g·cos(arcsin(aY/g))·cos(-arcsin(aX/g))=g·
与式(9)联立,可计算得到更加精确的俯仰角速度Δθi和横滚角速度Δϕi
其中aX和aY的符号根据无人机操控员对遥控器的控制决定。无人机在进行航向角变化时所受到的力为X轴、Y轴方向上的合力,因此转向的加速度为aψ为
aψ=
因此,转向角速度Δψi为
Δψi=sign(aψ)·arccos
在(t0,tj)时间内姿态角的变化量(Δψ,Δθ,Δϕ)为
无人机在Z轴的转动可以通过X轴和Y轴方向上的转动体现,因此,其向量可表示为
无人机的位移向量可以通过如下的数学模型进行描述:
(t0,tj)=Δ + (+ + )dt
其中ΔTV表示气流对无人机的影响。
3 目标定位精度影响因素分析
假定初始条件:目标为敌方一辆装甲车,无人机距离火炮发射舰约40km,距地面高度为600m,位于火炮发射舰北偏东60°。当无人机航向角为220°时,摄像头的横滚和纵摇均为0°,捕获到目标与地面参考物在同一视场角内,初始姿态角为(ψVP0,θVP0,ϕVP0),地面参考物在炮兵地图上标注海拔为1100m。无人机GPS定位误差设为100m,姿态陀螺仪的测量误差在1°以内。激光成像雷达探测误差为1%[19⇓-21]。在本人之前所做的工作中[22],对目标定位模型进行了仿真验算,通过1000次的独立仿真计算后得到的无人机坐标平均值为(34604,19863,551),对无人机定位误差为1210m*698m*654m。目标点坐标平均值为(33504,18790,98),对目标的定位误差为1202m*680m*631m,远不能满足舰炮武器系统实施打击所需的目标指示精度。本文建立的目标定位模型,通过计算得到目标点的平均坐标为(32153,16801,-1),在x-y-z轴方向上的误差范围是332m*175m*188m。与三角几何定位、测向交叉定位、最小二乘无源定位等单机定位方法相比,目标定位精度有了较大提高,在此不再重复计算。
为了确定本文所建立的目标定位模型的可持续性,下面在典型情况假定下,对目标定位精度的影响因素进行分析。
3.1 无人机与目标的距离对目标定位精度的影响
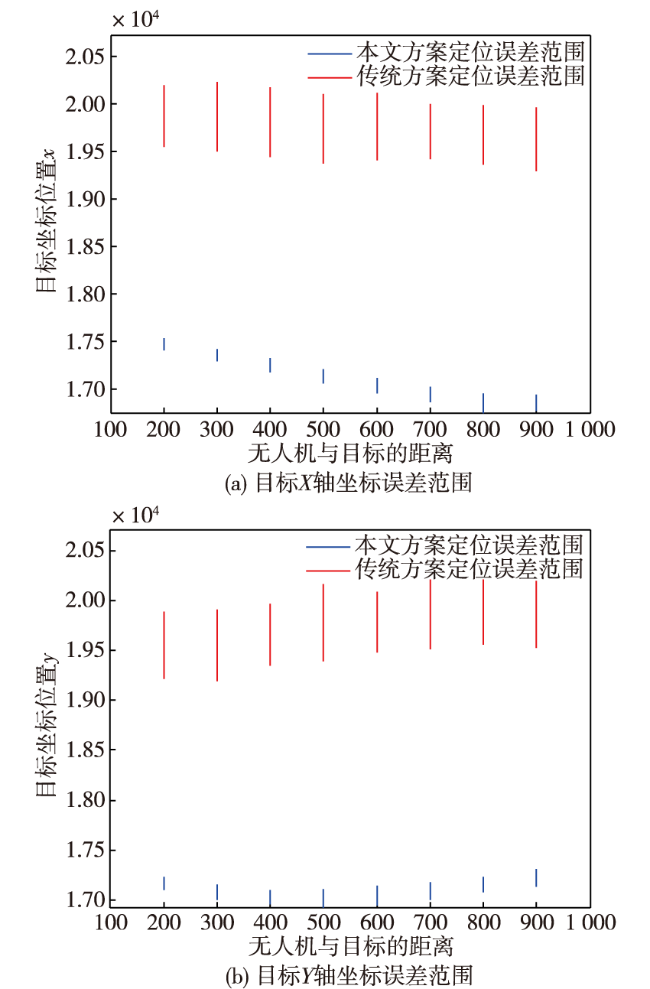
假设无人机始终以-40°左右的目标高低角、10°左右的目标方向角对目标进行捕获定位,无人机与目标的直线距离dVP在200m-900m的范围内进行变化,如图5 所示。根据本文提出的目标定位模型,利用Matlab软件计算,并和传统意义上的单无人机目标定位方法结果进行比较。结果如图6 所示。
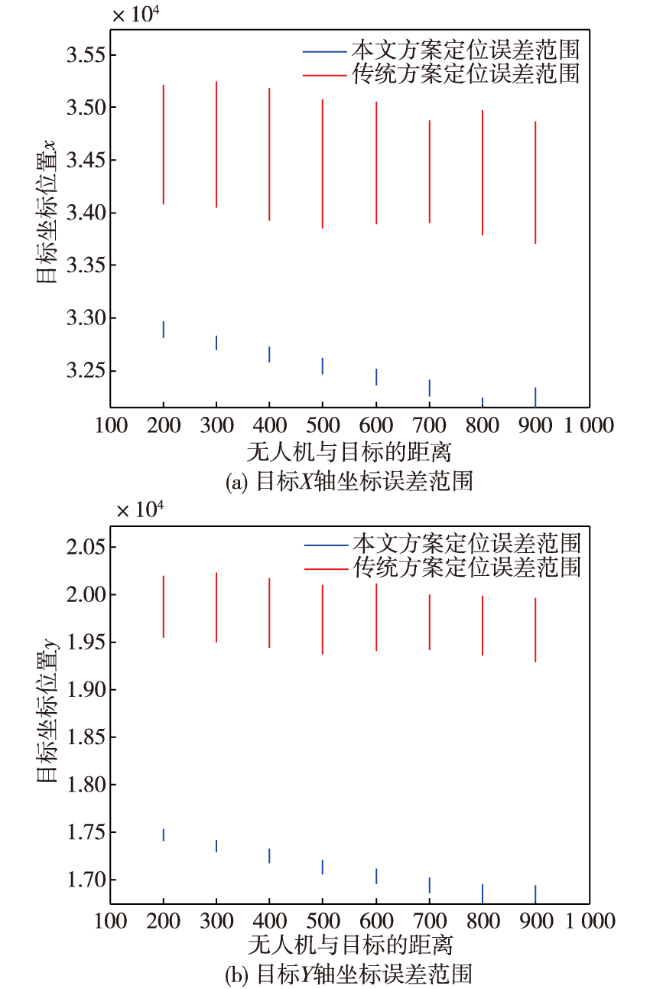
计算结果表明,本文建立的单无人机目标定位体系,与传统的通过GPS进行自定位的无人机目标定位体系相比,在目标定位误差上,有了明显的降低,通过计算可得,当无人机与目标之间的距离在200m-300m的范围时,目标综合定位误差最小,但考虑实际应用,无人机距离太近,易被敌方发现,因此,在大于400m的范围以外进行侦察,当无人机与目标直线距离在500m-600m左右时,能够达到相对较小的目标定位误差,这与当前国内外已经研发的主流激光传感器、电视图像传感器的探测性能也相符。且当无人机与目标距离为900m时,误差范围为182m*200m*202m,当探测距离缩小为200m时,定位误差范围为147m*125m*187m,目标定位精度误差增加了35m*75m*15m,探测精度的变化范围对舰炮制导炮弹超视距打击作战而言,仍然在可控范围内,对前沿侦察人员的操作使用也更加灵活。
3.2 无人机探测角度对目标定位误差的影响
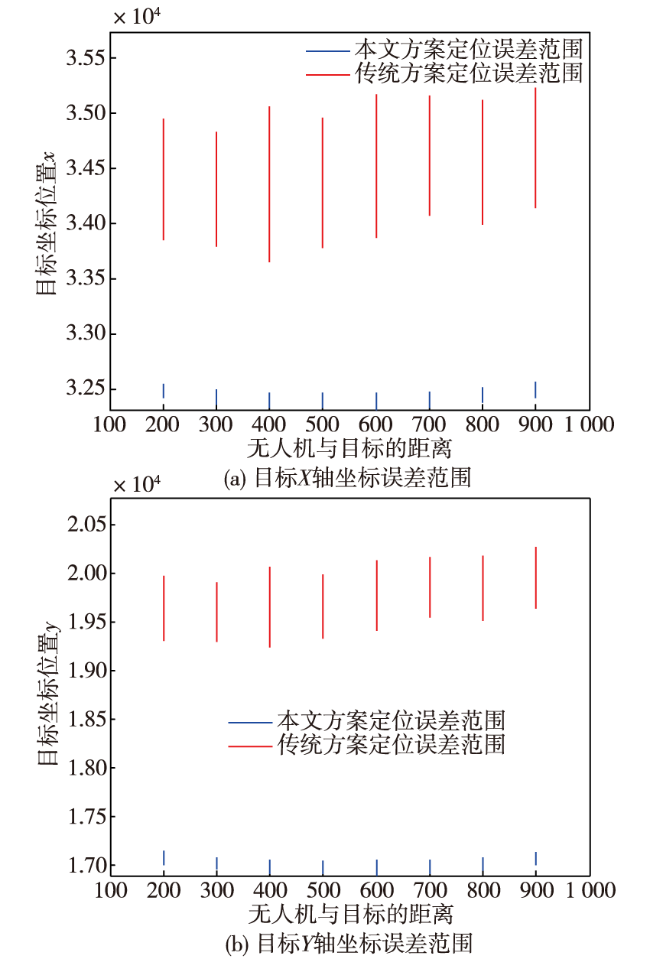
上文对无人机与目标的距离dVP进行调整后,对目标定位精度进行计算,得到目标定位误差范围最小的探测距离为500m≤dVP≤600m,设dVP=600m,在此基础上,改变无人机上传感器角度,即改变目标与无人机之间的高低角εVP和方向角BVP,如图7 和图8 所示。
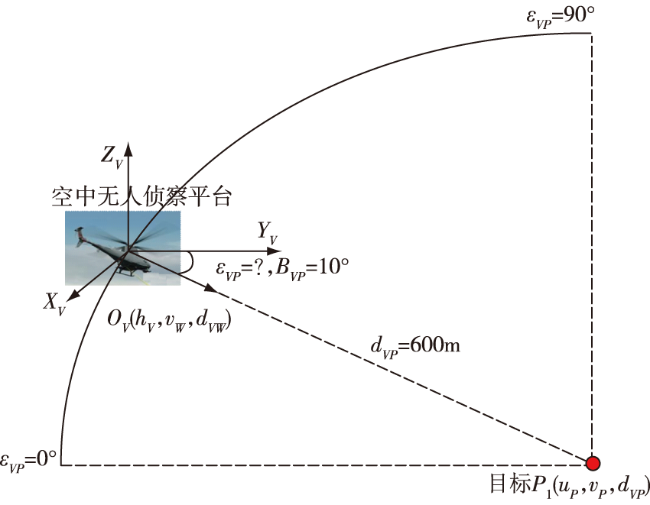
计算结果表明,当目标与无人侦察平台处于不同的高低角位置时,对目标的定位误差范围最小为150m*152m*184m(当εVP=-20°时),最大为163m*181m*178m(当εVP=-50°时),误差变化范围为13m*29m*6m,可见,本文建立的目标定位模型,在无人机位于目标不同的高低姿态角的情况下,都能比较稳定的对目标进行定位。
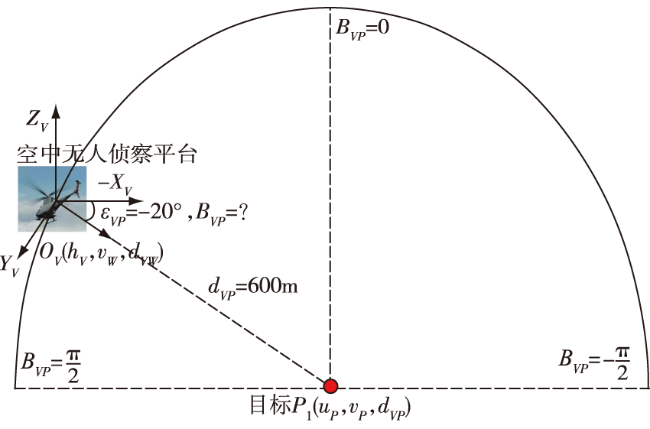
同样,如图8 所示,目标P1位置参数未知,前面通过仿真计算得到了当εVP=-20°时,对目标的定位误差范围最小,在此基础上,对模型再次进行调整,改变无人平台与目标之间的方向角,从水平方向对本文建立的模型的目标定位稳定性进行计算,方向角范围为0≤BVP≤80°,调整幅度同样是10°(例外:当目标与无人平台的方向角为90°时,即目标位于无人机的正右方,与电视传感器的使用相违背;当-80°≤BVP≤0°时,目标从无人机的右方转移到左方,并没有实质性的变化,因此,这两种情况不予考虑)。计算结果如图10 所示。
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
通过比较,不仅在目标位置信息的可靠性方面,在目标相对于己方舰艇位置坐标的误差范围,本文建立的目标定位模型都要优于传统的单无人机目标定位方法,通过计算,当目标与无人平台的方向角度在30°以内时,目标定位误差范围较小。当侦察环境恶劣,无法将无人平台调整至最合适的侦察角度时,不论目标与无人平台之间的方向角处于何种情况,误差变化量最大与最小之间仅相差23m*32m*55m。
通过上述的仿真计算,本文所建立的目标定位模型在稳定性和定位精度上,都要远远好于传统的单无人机目标定位模型。
4 结束语
通过便携式无人机进行目标定位,能够适应复杂地形的战场环境,本文建立的无人机目标指示模式模型,降低了微/小型无人机飞行过程中随机误差带来的定位误差,提高了超视距舰炮武器系统火力打击的目标指示精度。
与传统的无人机目标指示不同的是,本文提出的方法主要结合战前战场侦察所获取的卫星地图或者炮兵地图,通过目标匹配,对参照点进行标定,无人机仅作为目标与参照点的中继,消除了无人机飞行过程中不确定因素造成的目标定位误差。另一方面,随着侦察卫星、遥感技术的发展,大量的战前侦察成了海军作战必不可少的阶段,选择山峰等特征明显的地形地貌,能够极大地提高目标定位精度。本文所建立的目标指示模型,其舰艇坐标系以地理坐标系为主,具有较强的适应性。