
 中国指挥与控制学会会刊
中国指挥与控制学会会刊 着小型涡喷发动机技术的不断成熟,以小型涡喷发动机为动力的高速无人机发展迅速,特别是作为靶机使用的高速无人机,近几年快速发展。高速无人机一般采用细长机身和小展弦比的气动布局[1],这就决定了无人机的机体质量基本上集中到机身,使得无人机的横侧向转动惯量要比俯仰转动惯量和偏航转动惯量小很多倍[2]。无人机飞行过程中横航向一般可以分为三个运动模态:滚转、荷兰滚和螺旋模态[3] 。荷兰滚和滚转是无人机飞行过程中两个重要模态,而因为荷兰滚和滚转模态周期较短,当荷兰滚阻尼不够时,无人机则会频繁地左右摇摆,当滚转阻尼较小时,滚转运动频率过高,滚转运动很快,两者都会影响无人机横侧向的稳定性,螺旋模态虽然周期一般较长,但是会对无人机横侧向的稳定性产生影响,因此必须分析荷兰滚、滚转和螺旋三种模态在无人机飞行过程中是否需要增稳,如何有效的增稳等。文献[4]根据无人机横侧向数学模型和自抗扰控制解耦理论,设计了自抗扰解耦控制系统,并利用Simulink进行了仿真验证,证明了ADRC技术解耦后的无人机横侧向系统具有较强的抗扰动性和鲁棒性。文献[5]提出了一种对小型无人机进行横侧向滚转角控制设计的新L1自适应控制方法,但是该方法对硬件处理能力要求高。文献[6]采用Simulink/Stateflow建模仿真方法,设计了纵向、侧向多模态控制系统结构,给出了相应的控制率。文献[7]设计了基于滚转角速率指令回路的滚转控制器,但是对高速无人机荷兰滚模态的稳定性没有进行具体研究。本文研究的某型高速无人机具有较大的上反效应和较小的航向静稳定性,致使无人机滚摆比很大。高空时,航向阻尼小,当速度大于一定值后荷兰滚模态已不稳定。为改善荷兰滚阻尼,通常引入偏航角速率反馈,但是不能改善稳定性,当荷兰滚模态不稳定时,速率反馈对稳定性没有改善。为了改善无人机的高速阶段横侧向稳定性,引入侧滑角反馈与滚转角速度反馈共同构成了增稳系统,通过仿真验证及实际飞行验证可知,该方法较好改善了高速无人机横侧向的稳定性。
1 问题提出
高速无人机飞行控制系统主要由飞行控制器、传感器系统、执行结构、测控链路组成。飞控系统组成框图如图1 所示。
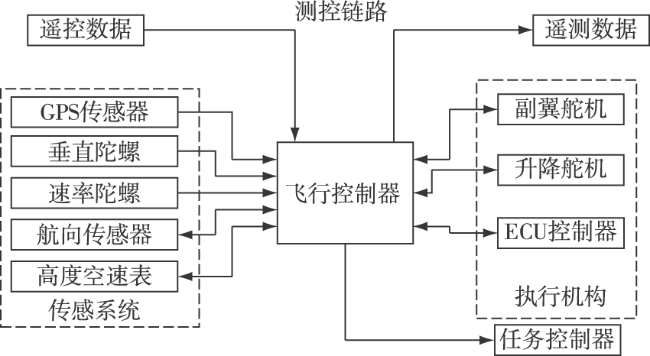
表1 荷兰滚模态特性 |
| 速度 | 特征根 | 固有频率 | 阻尼 |
|---|---|---|---|
| 140 | -0.462±5.71i | 5.73 | 0.0807 |
| 150 | -0.290±5.77i | 5.78 | 0.0502 |
| 160 | -0.121±5.86i | 5.86 | 0.0206 |
| 170 | 0.0041±5.97i | 5.97 | - |
| 180 | 0.195±6.11i | 6.11 | - |
2 解决措施
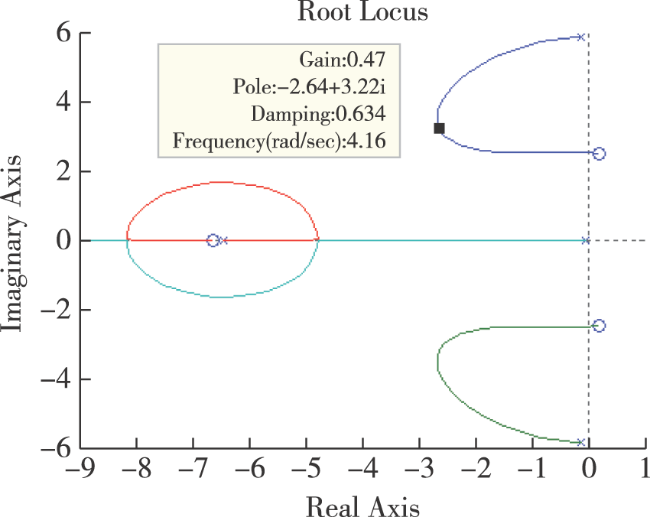
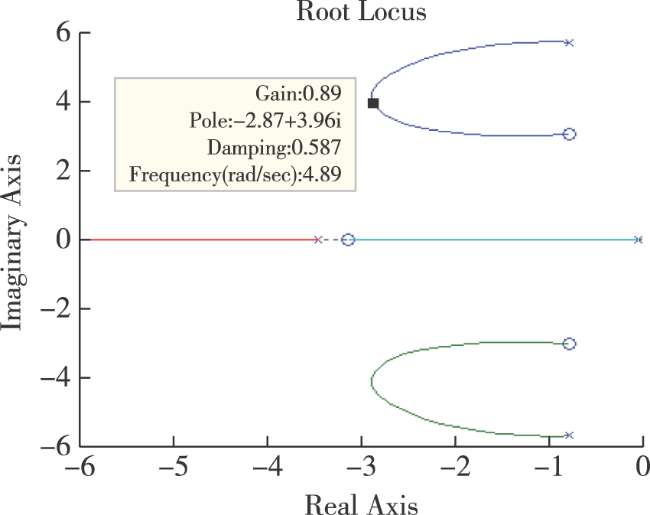
考虑为改善荷兰滚阻尼,通常引入偏航角速率反馈,但是不能改善稳定性,当荷兰滚模态不稳定时,速率反馈对稳定性没有改善。图2 和图3 分别给出了速度在120 m/s、160 m/s荷兰滚阻尼根轨迹,结果表明偏航角速率对荷兰滚阻尼有很大改善。
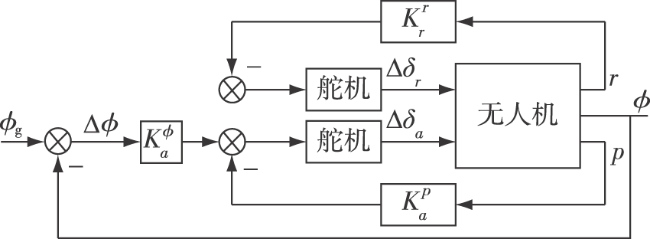
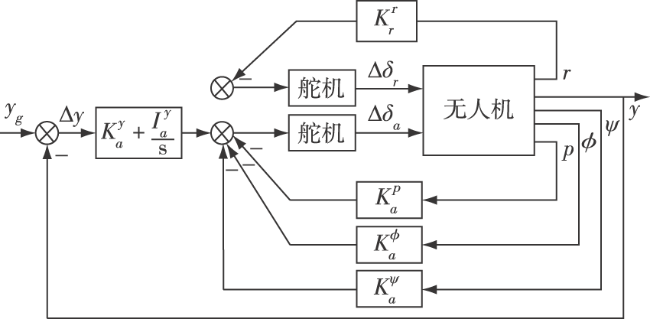
滚转角(Φ)保持与控制系统是在横侧向阻尼系统基础上实现的,其结构图如图4 所示。
航向角(Ψ)保持与控制系统以滚转角保持与控制系统为内回路,其结构图如图5 所示。

航迹保持与控制是在航向角保持与控制系统的基础上实现的,其结构图如图6 所示。
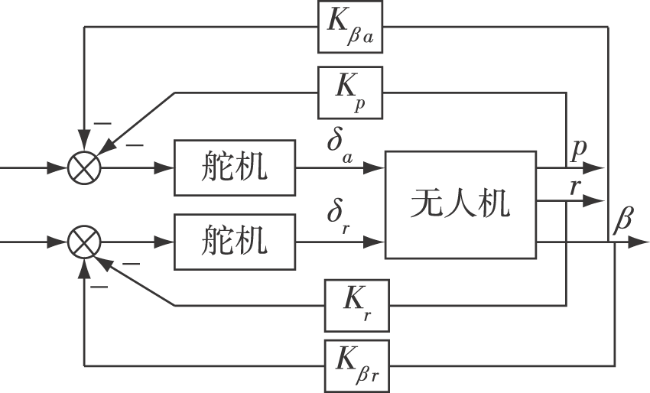
增稳系统结构图如图7 所示。横侧向增稳控制系统完整的控制律构型如公式(1)所示,其中p表示滚装角速度,r表示偏航角速度,β表示侧滑角,δa表示副翼舵偏角,δr表示方向舵偏角。
无人机横侧向运动传递函数的零极点分布和频率特性表明,荷兰滚模态用方向舵控制比用副翼舵控制有效,而滚转阻尼模态用副翼舵控制比用方向舵控制有效,航向增稳系统主要用于改善荷兰滚模态品质,而横向增稳系统首要目的是改善滚转模态特性,同时兼顾改善荷兰滚模态品质。由无人机横侧向运动方程可以近似得出荷兰滚总阻尼和固有频率的表达式如公式(2)和(3)所示。其中Y表示侧向力,N表示偏航力矩,L表示滚转力矩,ζd表示荷兰滚模态阻尼比,ωnd荷兰滚模态固有频率。
2ζdωnd≈(Yβ+Nr)- (Np- )
≈YβNr-Nβ≈-Nβ
通过在方向舵通道中引入偏航角速度反馈(改变Nr)和侧滑角反馈(改变Nβ),可以改变荷兰滚模态的阻尼比和固有频率,达到改善荷兰滚模态品质的目的。侧滑角信号难以直接获得,所以常用安装于重心附近的侧向加速度计的输出信号代替侧滑角,无人机重心处侧向加速度为:
ay≈-V0(Yββ+Yδrδr)
通常:ay≈-V0Yββ,可见引入侧向加速度反馈可以起到与用侧滑角反馈相同的效果[3]。
另外,将偏航角速度反馈到方向舵通道改善荷兰滚模态的有效性,通常取决于方向舵到偏航角速度传递函数(公式(5))的分子中二次零点的位置。
=
通常
≈
2ζrωr≈Yβ+ Nβ-
对于小的Lp、大的Lβ状态,ωr可能接近于ωnd;或者ζrωr成为负值时,二次零点位于右半平面。只有当 <1时,偏航角速度反馈改善荷兰滚阻尼才能起到较好的作用,为了改善ωr不够小的情况,可以引入滚转角速度反馈到副翼通道以增大Lp或引入侧滑角反馈减小Lβ(一般引入侧加速度反馈)。
3 仿真模型

4 结果分析
4.1 无侧滑角反馈仿真
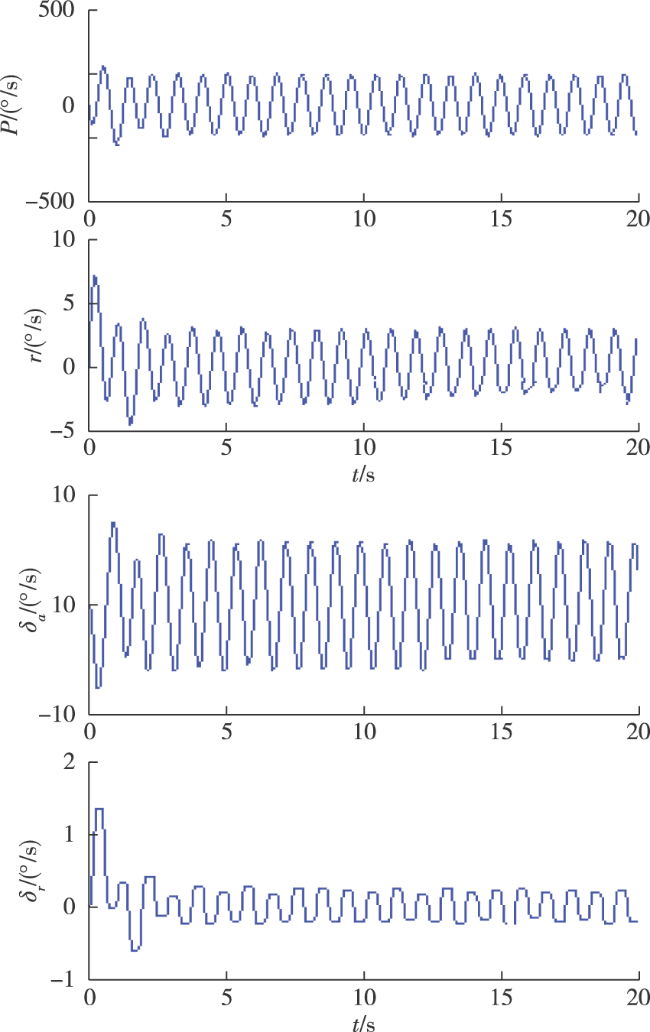
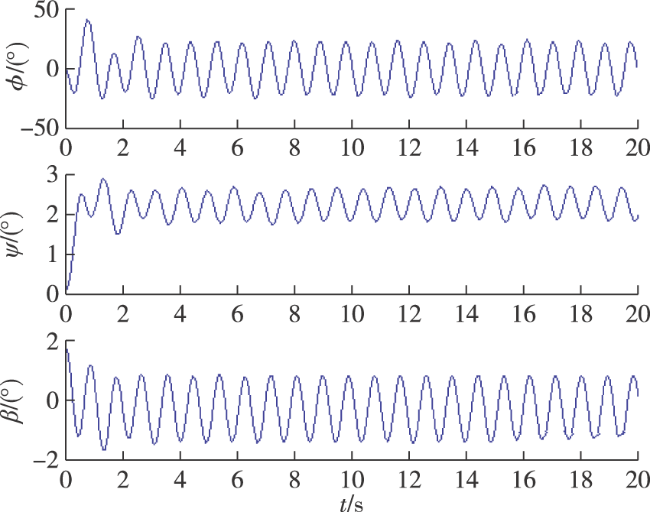
本文选取参数Kr=0.6、Kp=0.1、Kφ=0.7,进行针对状态高度1 000 m,速度190 m/s的线性化模型仿真。初始侧滑角扰动Δβ=2°,滚转角速度Δp、偏航角速度Δr、侧滑角Δβ、副翼舵Δδa及方向舵Δδr响应曲线如图9 所示,滚转角、偏航角及侧滑角响应曲线如图10 所示。可以看出在没有侧滑角反馈的情况下滚转角速率没有得到有效抑制,滚转角在±20°范围内震荡,侧滑角在±1.2°范围内震荡。荷兰滚模态处于不稳定状态。
4.2 有侧滑反馈仿真
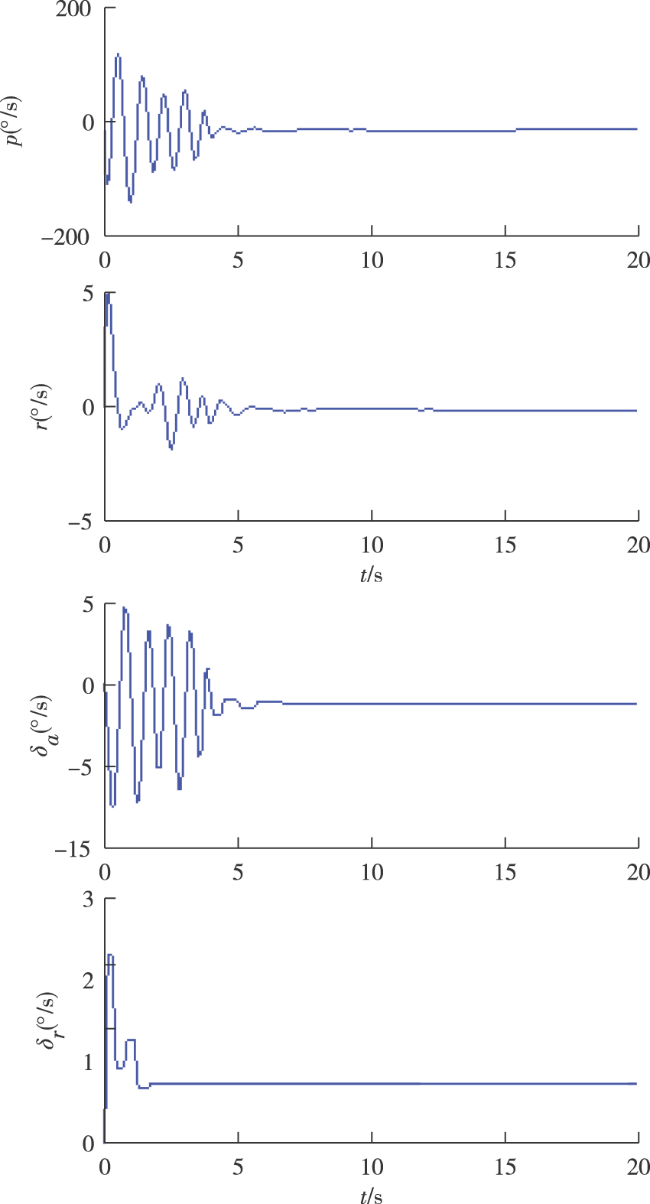
本文选取参数Kr=0.6、Kp=0.1、Kφ=0.7、Kβa=-2、Kβr=2进行仿真。高度1 000 m,速度190 m/s,初始侧滑角扰动Δβ=2°,滚转角速度Δp、偏航角速度Δr、侧滑角Δβ、副翼舵Δδa及方向舵Δδr响应曲线如图11 ,滚转角、偏航角及侧滑角响应曲线如图12 所示,可以看出引入侧滑角反馈后滚转角速度和滚转角在5 s内收敛稳定,荷兰滚模态迅速稳定收敛。从图11 和图12 可以看出稳定后侧滑角收敛于0.2°左右,由于航向角速度稳定于-0.1°/s左右,所以航向角ψ在缓慢增大,这是长时间尺度下螺旋模态的典型特征,即在扰动运动后期表现为几乎无侧滑的缓慢的偏航运动。由于高速无人机具有足够的上反效应,因此其螺旋模态是稳定的。为了提高航向角控制精度,在航向角保持与控制控制率中引入了积分项消除航向稳态误差。因此可以保证无人机的稳定飞行。

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
5 结束语
本文针对某型无人机在高速飞行时出现的横侧向不稳定问题,提出了引入侧滑角反馈与滚转角速度反馈共同构成增稳系统的解决方案,设计了无人机横侧向控制率,建立了增稳系统的控制模型。仿真结果表明选取的控制参数对高速适应性较好,满足高速无人机对横侧向控制指标要求。实际飞行检验了该 方法有效性,可以为其他无人机提供参考。下一步根据实际需求完成高速大机动飞行时的横侧向增稳设计。