
 中国指挥与控制学会会刊
中国指挥与控制学会会刊 纯方位TMA(目标运动分析)技术是水下作战平台的一个关键技术,几十年来一直得到国内外学者的研究[1,2,3,4,5,6,7,8,9,10,11,12,13,14,15,16,17,18],提出了诸多有效的解算方法,典型的有Kalman滤波方法、极大似然估计方法、Taylor级数方法等。Kalman滤波类方法中最有效的是修正极坐标方法[6],是国内外诸多系统中常备算法,缺点是对滤波初值的选取较为敏感,必须结合实际应用背景事先选好一些可行的初值。极大似然估计方法 [9]是诸多被动定位系统尤其是水下系统的主要算法,可由非线性优化方法[15]实现计算。Taylor级数法[18]也是常用的TMA方法[19],尤其在无线电定位系统中[20],这种方法的缺点也是需要一个初始值,且对初始值较为敏感,由于是局部校正,因此无法保证迭代计算的收敛性。
由于Taylor级数方法简单易行,是各种被动定位系统中的常用算法,因此,本文针对纯方位量测条件下基于单个观测平台(有效机动)的目标运动分析问题,对Taylor级数方法进行仿真分析,提出一些改进措施,结果表明能够大幅提高解算效果。
1 Taylor级数方法描述
假定定常未知量设为X∈Rp,量测量设为zk∈Rq,k=1,2,…,n,量测方程一般为非线性方程
zk=fk +εk
其中fk ∈Rq,εk∈Rq。
对式(1)在点X0处进行Taylor级数一次展开
zk≈fk +Ñfk ·dX+εk
其中
dX=X-X0
Ñfk = ∈Rq×p
并且略去了二阶以上的高阶项。为方便起见,令
=zk-fk
Hk=Ñfk
那么式(2)改写为
≈Hk·dX+εk
利用线性最小二乘方法可得
dX= H'kzk
令
X1=X0+dX
返回式(2)~(8)进行迭代计算,直至收敛。这便是Taylor级数方法的大致计算过程。
对于纯方位TMA问题(假定目标匀速直航)来讲,可以选取
X= '
其中(xT0,yT0)是目标的初始位置坐标,VTx、VTy是目标速度分量(大地直角坐标系)。
量测方程为
Bk=arctg +εk
其中Bk为目标在tk时刻相对观测平台方位,(xOk,yOk)是观测平台在时刻tk的位置坐标(坐标原点一般设在观测平台的初始位置),Δtk=tk-t0,t0为初始时刻,一般设为零时刻。此时未知量X的维数p=4,量测量zk的维数q=1。
选择一个初值X0,由式(11)不难计算出
Ñfk = (cos ,-sin ,Δtk·cos ,-Δtk·sin )
其中 为由选取的目标运动参数X0推算的目标在tk时刻与观测平台的距离, 是相应的推算方位。修正的量测项则为
=Bk-
这样,给定初始值X0后,依据公式(12)、(13),按照公式(2)~(8)的流程就可以迭代计算目标运动参数X。
但直接利用式(12)、(13)进行计算是不可行的,因为式(12)中的各分量的分子远远小于分母( ),最终导致公式(8)中的矩阵 H'kHk奇异。
比如,取初距D0=30 km、速度VT=20 kn、初始舷角QT=30°的态势,观测平台按照下文“仿真分析”部分的航路机动,采样间隔Δt=1 s,总采样时间T=10 min,不叠加量测误差。选取迭代初始值D0=25 km、速度VT=18 kn、初始舷角QT在区间[5°,55°]均匀随机选取,计算20条航次。观测平台量测10 min时,迭代结果如表1 所示。
表1 原始算法结果 |
| D0=30.000 VT=20.00 QT=30.00: |
|---|
| Taylor_LS JQT_l=37.04: detA=7.259595e-023 dD0=-3.006% dVT=-0.59 dQT=1.47 |
| Taylor_LS JQT_l=40.58: detA=7.315372e-023 dD0=-3.101% dVT=-0.87 dQT=2.46 |
| Taylor_LS JQT_l=48.07: detA=7.092137e-023 dD0=-3.231% dVT=-1.59 dQT=4.84 |
| Taylor_LS JQT_l=48.86: detA=7.045509e-023 dD0=-3.237% dVT=-1.67 dQT=5.11 |
| Taylor_LS JQT_l=21.36: detA=5.648662e-023 dD0=-2.521% dVT=-0.29 dQT=-1.57 |
| Taylor_LS JQT_l=53.15: detA=6.729683e-023 dD0=-3.234% dVT=-2.12 dQT=6.61 |
| Taylor_LS JQT_l=28.97: detA=6.697568e-023 dD0=-2.758% dVT=-0.20 dQT=-0.41 |
| Taylor_LS JQT_l=25.05: detA=6.212559e-023 dD0=-2.636% dVT=-0.18 dQT=-1.09 |
| Taylor_LS JQT_l=21.37: detA=5.649607e-023 dD0=-2.521% dVT=-0.29 dQT=-1.57 |
| Taylor_LS JQT_l=53.78: detA=6.675171e-023 dD0=-3.229% dVT=-2.19 dQT=6.84 |
| Taylor_LS JQT_l=06.10: detA=2.852902e-023 dD0=-1.749% dVT=-2.25 dQT=-1.81 |
| Taylor_LS JQT_l=20.19: detA=5.451278e-023 dD0=-2.483% dVT=-0.35 dQT=-1.69 |
| Taylor_LS JQT_l=28.93: detA=6.692936e-023 dD0=-2.757% dVT=-0.20 dQT=-0.42 |
| Taylor_LS JQT_l=12.33: detA=4.002634e-023 dD0=-2.182% dVT=-1.15 dQT=-2.05 |
| Taylor_LS JQT_l=17.06: detA=4.893472e-023 dD0=-2.378% dVT=-0.59 dQT=-1.93 |
| Taylor_LS JQT_l=12.37: detA=4.008886e-023 dD0=-2.183% dVT=-1.15 dQT=-2.05 |
| Taylor_LS JQT_l=36.57: detA=7.243727e-023 dD0=-2.992% dVT=-0.55 dQT=1.34 |
| Taylor_LS JQT_l=51.16: detA=6.888567e-023 dD0=-3.243% dVT=-1.91 dQT=5.90 |
| Taylor_LS JQT_l=14.82: detA=4.475042e-023 dD0=-2.293% dVT=-0.83 dQT=-2.02 |
| Taylor_LS JQT_l=19.64: detA=5.356037e-023 dD0=-2.465% dVT=-0.38 dQT=-1.75 |
其中,JQT_l表示随机选取的目标初始舷角(度),detA表示矩阵 H'kHk的行列式值,dD0、dVT、dQT分别表示初距、速度、初始舷角解算误差,单位为相对误差、节、度。从中可以看出,原始算法的正规矩阵接近奇异,即使初值选取在真值附近,迭代也收敛不到真值。下一节给出一种改进形式。
2 Taylor级数方法的一种改进
一种直观的改进思路是增大矩阵 H'kHk的行列式值,消除其奇异性。选择一个大数wk,式(12)、(13)同乘以wk,以增大Hk各元素的绝对值,同时就增大了矩阵 H'kHk的行列式值。式(8)就改写为
dX= wkH'kzk
为简单起见,令
wk=
l≥0。l=0时就是原始Taylor级数法,本文选取l=1,2,…,6进行考察,表示6种改进方法。
3 仿真分析
3.1 仿真态势
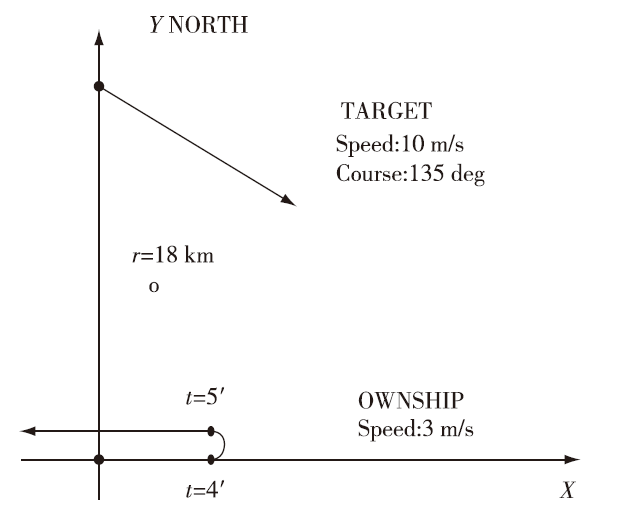
选用文献[21]仿真算例的观测平台机动方式,速度VO=3 m/s(约5.83 kn),从坐标原点沿航向CO1=90°航行4 min,再反向转180°,用时1 min,转向之后的航向CO2=270°。目标初始位置位于y轴上(即初始方位B0=0°),如图1 所示。
{kind=link}
{kind=link}
D0=10,15,20,25,30(km)
VT=10,15,20,25,30(kn)
QT=10°,30°,50°,70°,90°
共125种态势。
观测平台导航不叠加误差,方位量测误差均方根σB=0.5°(同文献[21] ),采样间隔Δt=1 s,总采样时间T=10 min。仅考察末端时刻tk=10 min时的解算结果。
3.2 Taylor_LSl的仿真分析
3.2.1 Taylor_LSl可行性仿真验证
把式(14)和(15)的改进方法称为Taylor_LSl方法,取l=1,2,…,6进行考察。
首先,仍取初距D0=30 km、速度VT=20 kn、初始舷角QT=30°的态势,不叠加量测误差。迭代初始值仍选择D0=25 km、速度VT=18 kn、初始舷角QT在区间[5°,55°]均匀随机选取,计算20条航次,10分钟时的迭代结果全部(l=1,2,…,6)收敛到真值,见表2 (仅给出5个航次结果)。
表2 改进算法结果 |
| D0=30.000 VT=20.00 QT=30.00: | ||
|---|---|---|
| j=1: | ||
| Taylor_LS1 JQT_l=37.04: detA=4.025131e-006 dD0=-0.000% | dVT=-0.00 | dQT=-0.00 |
| Taylor_LS2 JQT_l=37.04: detA=2.146448e+012 dD0=0.000% | dVT=0.00 | dQT=-0.00 |
| Taylor_LS3 JQT_l=37.04: detA=1.146189e+030 dD0=0.000% | dVT=0.00 | dQT=-0.00 |
| Taylor_LS4 JQT_l=37.04: detA=6.129009e+047 dD0=0.000% | dVT=0.00 | dQT=-0.00 |
| Taylor_LS5 JQT_l=37.04: detA=3.281891e+065 dD0=0.000% | dVT=0.00 | dQT=-0.00 |
| Taylor_LS6 JQT_l=37.04: detA=1.759792e+083 dD0=-0.000% | dVT=0.00 | dQT=-0.00 |
| j=2: | ||
| Taylor_LS1 JQT_l=40.58: detA=4.025131e-006 dD0=-0.000% | dVT=-0.00 | dQT=-0.00 |
| Taylor_LS2 JQT_l=40.58: detA=2.146448e+012 dD0=0.000% | dVT=0.00 | dQT=-0.00 |
| Taylor_LS3 JQT_l=40.58: detA=1.146189e+030 dD0=0.000% | dVT=-0.00 | dQT=0.00 |
| Taylor_LS4 JQT_l=40.58: detA=6.129009e+047 dD0=0.000% | dVT=-0.00 | dQT=0.00 |
| Taylor_LS5 JQT_l=40.58: detA=3.281891e+065 dD0=0.000% | dVT=0.00 | dQT=-0.00 |
| Taylor_LS6 JQT_l=40.58: detA=1.759792e+083 dD0=0.000% | dVT=0.00 | dQT=-0.00 |
| j=3: | ||
| Taylor_LS1 JQT_l=48.07: detA=4.025131e-006 dD0=0.000% | dVT=0.00 | dQT=-0.00 |
| Taylor_LS2 JQT_l=48.07: detA=2.146448e+012 dD0=0.000% | dVT=0.00 | dQT=-0.00 |
| Taylor_LS3 JQT_l=48.07: detA=1.146189e+030 dD0=0.000% | dVT=0.00 | dQT=-0.00 |
| Taylor_LS4 JQT_l=48.07: detA=6.129009e+047 dD0=-0.000% | dVT=-0.00 | dQT=0.00 |
| Taylor_LS5 JQT_l=48.07: detA=3.281891e+065 dD0=0.000% | dVT=0.00 | dQT=-0.00 |
| Taylor_LS6 JQT_l=48.07: detA=1.759792e+083 dD0=0.000% | dVT=0.00 | dQT=-0.00 |
| j=4: | ||
| Taylor_LS1 JQT_l=48.86: detA=4.025131e-006 dD0=0.000% | dVT=0.00 | dQT=-0.00 |
| Taylor_LS2 JQT_l=48.86: detA=2.146448e+012 dD0=-0.000% | dVT=-0.00 | dQT=-0.00 |
| Taylor_LS3 JQT_l=48.86: detA=1.146189e+030 dD0=0.000% | dVT=0.00 | dQT=-0.00 |
| Taylor_LS4 JQT_l=48.86: detA=6.129009e+047 dD0=0.000% | dVT=0.00 | dQT=-0.00 |
| Taylor_LS5 JQT_l=48.86: detA=3.281891e+065 dD0=0.000% | dVT=0.00 | dQT=-0.00 |
| Taylor_LS6 JQT_l=48.86: detA=1.759792e+083 dD0=0.000% | dVT=0.00 | dQT=-0.00 |
| j=5: | ||
| Taylor_LS1 JQT_l=21.36: detA=4.025131e-006 dD0=-0.000% | dVT=-0.00 | dQT=-0.00 |
| Taylor_LS2 JQT_l=21.36: detA=2.146448e+012 dD0=0.000% | dVT=0.00 | dQT=-0.00 |
| Taylor_LS3 JQT_l=21.36: detA=1.146189e+030 dD0=-0.000% | dVT=0.00 | dQT=-0.00 |
| Taylor_LS4 JQT_l=21.36: detA=6.129009e+047 dD0=0.000% | dVT=0.00 | dQT=-0.00 |
| Taylor_LS5 JQT_l=21.36: detA=3.281891e+065 dD0=0.000% | dVT=0.00 | dQT=-0.00 |
| Taylor_LS6 JQT_l=21.36: detA=1.759792e+083 dD0=-0.000% | dVT=-0.00 | dQT=-0.00 |
可见式(14)和(15)的改进方法是可行的。
3.2.2 Taylor_LSl初值敏感性总体仿真分析
考察改进方法Taylor_LSl(l=1,2,…,6)对迭代初值的敏感性。选取[10,30] (km)、[8,25] (kn)、[-80,90] (°)为初值选取范围,初值从这3个区间内均匀随机选取。对每一态势运行50个航次,每次都改变初值,不叠加量测误差。
结果表明,当迭代初值“远离”真值时,改进方法还是会发散的,具体有以下几点表现:
1) “远离”尺度没有严格的阈值,有时“大”尺度能收敛,“小”尺度也可能发散。比如,对于态势D0=10 km、VT=10 kn、QT=10°,两次运行结果如表3 、4所示。
表3 改进算法J=18航次结果 |
| 初始值误差:dD0=20.7134% dVT=140.80% dQT=-50.49 dDV=100.6294% | ||
|---|---|---|
| detA=1.660807e-002 delta_X=0.000000: Taylor_LS1: dD0=0.000% | dVT=0.00 | dQT=-0.00 |
| detA=7.757797e+013 delta_X=0.000000: Taylor_LS2: dD0=0.000% | dVT=-0.00 | dQT=-0.00 |
| detA=3.651983e+029 delta_X=0.000000: Taylor_LS3: dD0=0.000% | dVT=0.00 | dQT=-0.00 |
| detA=1.732861e+045 delta_X=0.000000: Taylor_LS4: dD0=0.000% | dVT=0.00 | dQT=-0.00 |
| detA=8.289429e+060 delta_X=0.000000: Taylor_LS5: dD0=-0.000% | dVT=-0.00 | dQT=0.00 |
| detA=3.998521e+076 delta_X=0.000000: Taylor_LS6: dD0=0.000% | dVT=0.00 | dQT=-0.00 |
表4 改进算法J=20航次结果 |
| 初始值误差:dD0=94.6992% dVT=11.79% dQT=-26.19 dDV=67.4795% |
|---|
| detA=6.79e-013 delta_X=9.95e+008: Taylor_LS1: dD0=9.97e+006% dVT=3.49e+006 dQT=-179.97 |
| detA=-1.08e+004 delta_X=2.16e+017: Taylor_LS2: dD0=1.67e+015% dVT=7.50e+014 dQT=-0.07 |
| detA=-7.67e+069 delta_X=1.10e+016: Taylor_LS3: dD0=3.03e+014% dVT=1.04e+015 dQT=124.13 |
| detA=-2.98e+129 delta_X=4.92e+016: Taylor_LS4: dD0=5.35e+014% dVT=7.53e+014 dQT=-135.15 |
| detA=-1.56e+203 delta_X=4.76e+016: Taylor_LS5: dD0=2.24e+014% dVT=4.67e+014 dQT=-116.66 |
| detA=-1.00e+264 delta_X=5.75e+017: Taylor_LS6: dD0=5.98e+015% dVT=3.75e+015 dQT=-106.69 |
6种改进方法的初始值相同,其中delta_X表示迭代结束时dX的2范数‖dX‖2,dDV= 。尽管J=18航次的距离、速度初值综合偏离度达到了100%,最终6种改进方法都收敛了,而J=20航次的综合偏离度为67%,6种改进方法却都发散了。
2) 改进方法Taylor_LS1的发散特征为detA接近0(<10-10),迭代结束时‖dX‖2是一个大数(>105)。
3) 改进方法Taylor_LSl(l=2,…,6)的发散特征为detA为负值(理论上应该>0,当detA<0时终止迭代),同样地‖dX‖2也是一个大数(>1010)。
4) 初值D0、VT的误差对迭代发散有“交互”作用,即ΔD0、ΔVT除自身影响外,也有“共同”影响。D0、VT、QT初值误差对发散的影响程度不一样。
5) D0=30 km时,没有发散现象出现,D0=20、25 km时有一些发散情况,当D0≤15 km时有较多的发散现象,即远距离态势发散情况较少出现或不出现。
3.2.3 Taylor_LSl单参数初值敏感性仿真分析
下面详细考察每一初值误差对迭代的影响。
先考察D0初值误差对迭代的影响。设VT=真值、QT=真值,D0在[10,30] (km)范围内均匀随机选取,仍不叠加量测误差,进行100航次统计计算。结果表明,对于D0=10 km态势,当VT=10 kn时,出现迭代异常的最小初距(相对)误差(简称异常误差,下同)>75%;当VT=15 kn,QT≤50°时出现迭代异常的误差>50%,其余态势的异常误差>75%;当VT=20 kn时,出现迭代异常的误差>50%;VT=25 kn的异常误差为:当QT≥40°时>50%,当QT≤30°时>10%;D0=10 km的每一态势的异常航次在5080航次之间。对于D0=15 km态势,当VT≤15 kn时,最小异常误差>75%,且每一态势的异常航次≤22;当VT≥20 kn时,最小异常误差>50%,且每一态势的异常航次≤31。D0≥20 km态势未出现异常航次。可见,近距离态势对距离初值误差较敏感。
再考察VT初值误差对迭代的影响。设D0=真值、QT=真值,VT在[8,30] (kn)范围内均匀随机选取,不叠加量测误差,进行100航次统计计算。统计结果为,对于D0=10 km态势,当VT=20 kn,QT=10°时,出现迭代异常的最小速度(相对)误差>50%,改进方法l=1有两个航次异常(l>1时无异常出现);当VT=25 kn,QT≤30°时出现迭代异常的速度初值误差>10%,所有改进方法出现异常,异常航次数在1845之间;其余态势未出现异常航次。可见,高速态势对速度初值误差较敏感。
最后考察舷角初值对迭代的影响。设VT=真值、D0=真值,QT在[-180°,180°]区间内均匀随机取值,不叠加量测误差,进行100航次统计计算。结果发现,迭代异常多发生在大初值误差情形。仅在D0=10 km、VT=25 kn、QT≤20°态势中,改进方法l=1,2当|ΔQT|≤25°时发散;在D0=10 km、VT=20 kn、QT≤30°和VT=25 kn、30°≤QT≤60°,以及D0=15 km、VT=25 kn的各种态势,当25°<|ΔQT|≤50°时发散。其余态势情况为,少部分态势当50°<|ΔQT|≤75°时发散,大部分发散情形皆为|ΔQT|>75°。并且对每一改进方法,发散航次数均小于10。可见,改进方法对舷角初值误差不太敏感。
上述仅考察了单参数初值误差的影响,实际上,多参数初值误差的交互影响也是存在的,由于其复杂性,本文暂不考虑。
3.2.4 Taylor_LSl初值选取
根据以上分析,距离初值应尽量选取“近距”值,以照顾近距态势对距离初值误差的敏感性,速度应尽量选取“高速”值,以适应高速态势对速度初值误差的敏感性,舷角初值选取真值左、右25°范围的值(以照顾舷角误差最敏感态势)。比如,如果态势范围就是上述仿真所用的态势范围,可以选取D0=12 km、VT=30 kn、QT在真值左右25°范围均匀随机选取。100航次仿真计算,仍发现有个别近距、高速、小舷角态势(D0=10 km:VT=25 kn、QT=20°和VT=30 kn、QT≤30°)某些航次(25 kn时航次数≤4,30 kn时航次数≤30)发散。修改初值D0=10 km,仅剩VT=30 kn的态势发散,再把QT初值限制在真值左右15°范围,就全部收敛了。
在实际运用中,可设定D0=10 km、VT=30 kn。如能由别的方法预估出QT,则把QT估值作为舷角初值。当不能预估QT时,若能判别出目标舷别,可取QT=±45°;当不能判别舷别时,可在[-90°,90°]或[-180°,180°]区间内均匀随机选取一QT值。若发散,则从QT开始左右各10°改变QT进行试算,直至收敛。发散判据依detA<10-10或‖dX‖2>1进行判别。
我们以QT在[-180°,180°]区间内选取为例,对3.1节中的125种态势进行验证,方位量测误差均方根σB=0.5°,统计10 000航次。由于当算法收敛时,6种改进方法结果等价,因此仅取l=2进行考察。统计结果表明,125种态势的10 000条航次没有发散情况出现。表5 给出了部分态势(对初值误差较为敏感的态势)的统计结果。
表5 改进算法优选初值解算结果,10 000航次统计 |
| D0= 10.000 VT=10.00 QT= 10.00: Taylor_LS2: sigma_D0= 0.849% sigma_VT= 0.36 sigma_QT= | 0.62 | |
|---|---|---|
| D0= 10.000 VT=10.00 QT= 20.00: Taylor_LS2: sigma_D0= 0.892% sigma_VT= 0.31 sigma_QT= | 0.82 | |
| D0= 10.000 VT=10.00 QT= 30.00: Taylor_LS2: sigma_D0= 0.939% sigma_VT= 0.27 sigma_QT= | 0.99 | |
| D0= 10.000 VT=30.00 QT= 10.00: Taylor_LS2: sigma_D0= 0.336% sigma_VT= 0.11 sigma_QT= | 0.50 | |
| D0= 10.000 VT=30.00 QT= 20.00: Taylor_LS2: sigma_D0= 0.411% sigma_VT= 0.13 sigma_QT= | 0.50 | |
| D0= 10.000 VT=30.00 QT= 30.00: Taylor_LS2: sigma_D0= 0.524% sigma_VT= 0.17 sigma_QT= | 0.50 | |
| D0= 20.000 VT=10.00 QT= 10.00: Taylor_LS2: sigma_D0= 2.050% sigma_VT= 1.81 sigma_QT= | 2.13 | |
| D0= 20.000 VT=10.00 QT= 20.00: Taylor_LS2: sigma_D0= 2.182% sigma_VT= 1.56 sigma_QT= | 3.56 | |
| D0= 20.000 VT=10.00 QT= 30.00: Taylor_LS2: sigma_D0= 2.326% sigma_VT= 1.35 sigma_QT= | 4.64 | |
| D0= 20.000 VT=30.00 QT= 10.00: Taylor_LS2: sigma_D0= 1.394% sigma_VT= 0.85 sigma_QT= | 0.57 | |
| D0= 20.000 VT=30.00 QT= 20.00: Taylor_LS2: sigma_D0= 1.466% sigma_VT= 0.73 sigma_QT= | 0.62 | |
| D0= 20.000 VT=30.00 QT= 30.00: Taylor_LS2: sigma_D0= 1.613% sigma_VT= 0.70 sigma_QT= | 0.68 | |
| D0= 30.000 VT=10.00 QT= 10.00: Taylor_LS2: sigma_D0= 3.265% sigma_VT= 4.25 sigma_QT= | 16.43 | |
| D0= 30.000 VT=10.00 QT= 20.00: Taylor_LS2: sigma_D0= 3.476% sigma_VT= 3.63 sigma_QT= | 14.51 | |
| D0= 30.000 VT=10.00 QT= 30.00: Taylor_LS2: sigma_D0= 3.649% sigma_VT= 3.07 sigma_QT= | 14.37 | |
| D0= 30.000 VT=30.00 QT= 10.00: Taylor_LS2: sigma_D0= 2.698% sigma_VT= 2.54 sigma_QT= | 0.96 | |
| D0= 30.000 VT=30.00 QT= 20.00: Taylor_LS2: sigma_D0= 2.818% sigma_VT= 2.01 sigma_QT= | 1.26 | |
| D0= 30.000 VT=30.00 QT= 30.00: Taylor_LS2: sigma_D0= 2.981% sigma_VT= 1.75 sigma_QT= | 1.46 |
4 结束语
本文对Taylor级数方法在纯方位目标运动分析应用中的发散问题进行了仿真讨论。首先通过引入较大的权值改进了原始方法的奇异性,其次通过仿真分析寻找到了较好的初值选取原则,最后利用方法的发散特征,提出了“万无一失”的舷角初值试探原则,保证了方法的收敛性。
改进方法的思想还可以推广应用到水面、空中单平台被动探测(雷达辐射探测、红外探测等)目标定位与跟踪中,以及水面、空中多平台纯方位交叉定位与跟踪应用中。