
 中国指挥与控制学会会刊
中国指挥与控制学会会刊 目前,反舰导弹仍然是水面舰艇面临的最大威胁之一,并且随着智能化、隐身化、高速性等水平不断提升,将对舰艇形成集群突防态势[1],给现有的舰艇对空防御系统带来新的挑战。
现有舰艇防空反导装备中用于拦截反舰导弹的武器,主要包括防空导弹和中小口径舰炮等硬武器,以及有源/无源干扰设备[2]等软武器。为了应付日益增强的反舰导弹威胁,舰艇对空防御系统也不断进行升级。一方面通过研制新型弹药,扩展武器系统拦截能力,例如美国雷神公司的MAD-FIRES(Multi-Azimuth Defense Fast Intercept Round Engagement System)弹药,作为一种炮射导弹,将导弹的制导能力、命中精度与炮弹的快速射击能力相结合,可以实现多方位快速拦截能力;另一方面通过升级和改造现有火控系统,通过信息能力的增强来实现作战能力的提升,以美国海军的舰载自防御系统(Ship Self-Defense System,SSDS)[3]为代表,该系统作为一种综合型全自动传感器融合和武器控制系统,具备多层次整体防御作战能力,在作战过程中可通过整合舰载传感器资源,完善信息共享手段,优化武器拦截策略,将各型拦截武器终端融为一体,可有效提升对反舰导弹的拦截效率。目前该系统已部署于美国海军多型航母和两栖舰艇,承担防空作战任务。
目前,国内在舰艇对空防御火控系统上也进行了多方面的深入研究。文献[4]对舰载集中式弹炮结合防空武器系统进行了总体设计,该系统优化了小口径舰炮武器和近程防空导弹的交接控制策略,实现了对目标的梯次拦截,在一定程度上提升了系统的多目标拦截能力;文献[5]重点考虑了不同口径舰炮武器系统的联合反导问题,综合利用中大口径舰炮射击产生水幕以及小口径舰炮射击形成弹幕,通过不同口径舰炮武器产生的终端效应在目标航路上实施联合拦截。文献[6]将信息化舰炮武器系统进行功能分解,根据作战任务的不同,实施功能动态重组,体现了舰炮武器功能系统模块化、通用化的设计理念;文献[7]提出了综合火控网的设计思路,构建了多平台武器协同控制系统的体系结构,该方案本质上通过基于分布式火控解算的协同火力控制模型,解决跨平台武器的协同控制问题。
通过上述分析,为了发挥各武器系统的协同交战能力,对空防御火控系统正逐步打破原有“烟囱式”的信息系统结构,向更为扁平化的结构发展,但是国内的研究主要还是集中在跟踪数据/火控处理数据的共享层次,尚未打破传统集中式雷达体制的制约。从反舰导弹的发展趋势来看,为对付此类小型、掠海高速、集群导弹类目标,有必要建立分布式雷达体系,利用频率和空间分集增益来深度挖掘雷达信号处理的潜力,进一步提升对空防御火控系统的多目标检测、群目标分辨,以及多目标精确跟踪等方面的能力。因此,本文应用新体制分布式MIMO(Multiple Input Multiple Output)雷达,基于开放式体系架构,提出新型对空防御火控系统的体系结构,为实现分布式雷达信号级数据融合处理提供了基础,可更高效地向各武器系统提供满足精度要求的目标跟踪数据,最终提高各武器系统拦截反舰导弹时的精确、协同作战能力。
1 现有对空防御火控系统
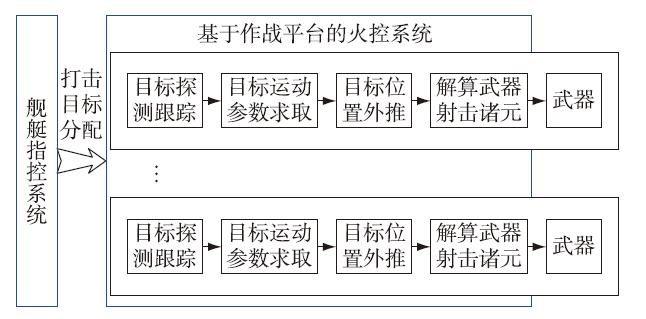
1.1 基于作战平台的火控系统
火控系统通常在火力打击中完成信息处理、火力控制,以及射击指挥等功能。基于作战平台的传统火控系统属于“烟囱式”的控制结构,往往依赖指控系统来分配目标指示数据,操作手根据下发的目标指示数据操控本系统内的跟踪传感器对该目标实施捕获和跟踪,为系统内的单一武器终端,进行射击/发射诸元解算,控制结构如图1 所示。目前现役火控系统,由于需要依赖其上级指挥系统提供的命令和目标指示数据,受“烟囱式”体系结构形式的制约,通常只能独立工作,无法实施传感器和武器的综合管控,体系拦截效率不够理想。
1.2 协同火力控制系统
舰艇编队指控系统根据目标来袭态势向各武器系统下达目标跟踪任务,发布作战命令,各武器系统再对拦截目标实施精确跟踪,并在武器系统级共享火控处理信息,武器终端根据目标处理信息计算具体的武器火力计划,该系统将战场上广泛分布的火控系统进行有机融合,使各武器系统具备协同火力打击能力,形成了多平台武器协同控制系统,见图2 。
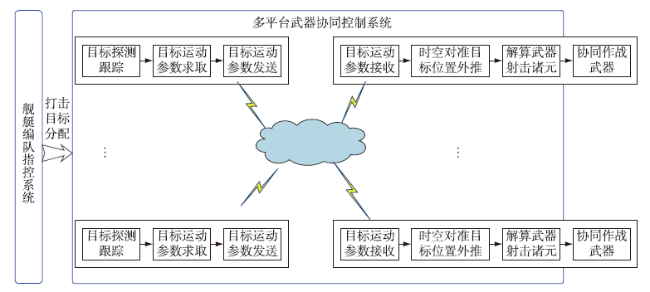
该系统特点在于利用多平台之间的高速通信网络,将各独立火控系统计算的目标运动要素进行发布,订阅者对发布的目标参数进行时空对准等处理后,即可进行武器射击(发射)诸元解算。
1.3 舰载自防御系统
为提升舰艇的综合对空防御能力,美国海军研制开发了舰艇自防御系统(SSDS)[8],该系统采用全分布式结构,实时调度和利用自防御资源,并与协同交战能力(Cooperative Engagement Capability,CEC)系统相融合,有效提高了对空防御系统的综合作战效能。SSDS采用开放式体系结构(Open Architecture,OA),将商用软硬件(Commercial off-the-shelf,COTS)通过光纤局域网(Fiber Distributed Data Interface,FDDI)连接而成,通过对各武器系统的改造和升级,使其成为具有探测、控制、交战能力的一体化防御系统。
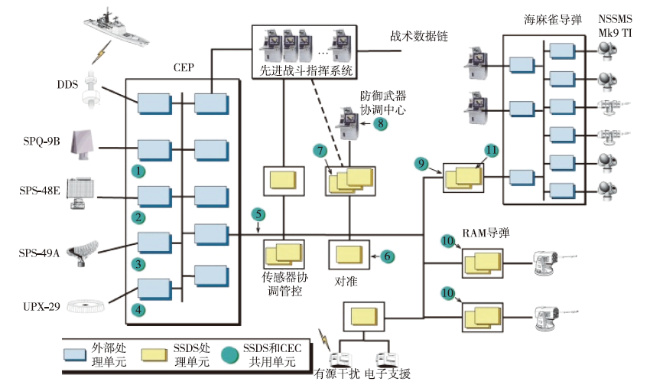
典型作战舰艇的SSDS配置如图 3 所示,通过融合不同类型雷达、电子支援系统、敌我识别器等数据对目标进行识别和判断,实施目标复合跟踪。在系统组成中,AN/SPS-49A为远程警戒,扫描周期5 s;AN/SPS-48E为三维对空搜索雷达,可实现俯仰电扫;AN/SPQ-9B具有反舰导弹探测模式,可在严重海杂波和电子干扰情况下探测得到掠海飞行的反舰导弹目标;NSSMS Mk 9 TI为海麻雀导弹火控照射器是一种连续波目标照射器,可提供距离、方位,以及仰角测量。每型雷达都存在特有的局限性,其中AN/SPQ-9B无法探测高仰角目标;AN/SPS-48E对于群目标可能无法进行多普勒分辨;AN/SPS-49扫描周期长,无法对付高机动目标;NSSMS Mk 9 TI只能跟踪单目标,而且受电子干扰的影响。该系统的特点就是能够综合各武器系统的传感器数据,采用数据融合技术形成目标跟踪轨迹,完成单个传感器无法完成的信息提取任务。
通过对美国海军SSDS的分析可见,其对空防御火控系统特点在于传感器数据的融合处理,除了能够进行点迹/航迹融合,形成单一综合空情图外,还能够面向终端武器定制火控滤波器,从而提供更精确化的目标瞄准数据,甚至能够更好地协同管控雷达波束资源,相比于协同火力控制系统中共享火控滤波后的目标运动参数,无疑实施了更为深层次的控制优化处理。
2 新型火控系统设计构想
根据突防任务的特点,反舰导弹逐步强化超高声速、掠海低空、隐身、复合精确制导、多角度打击、集群智能等特征,将给现有舰载对空防御火控系统带来新的挑战。
2.1 新型火控系统结构
面对反舰导弹的未来作战样式,SSDS也难以有效地解决目标跟踪通道迅速增多、集群目标超分辨识别,以及低空掠海跟踪等诸多挑战。
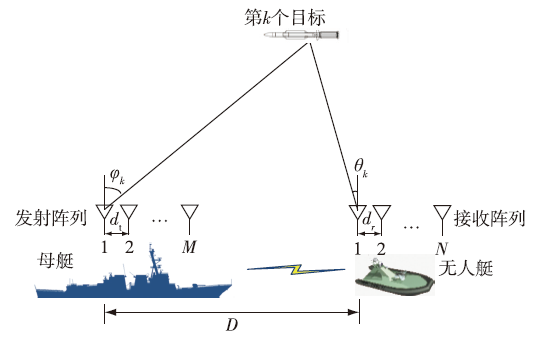
随着无人艇逐渐成为海上无人作战体系的重要组成部分,为了有效应付未来反舰导弹的突防威胁,可利用无人艇作为舰艇编队最外层防御力量,通过无人艇搭载火控系统传感器实时获取外围环境和目标信息,并实时将探测信号高速回传给母舰进行集中式处理,可有效增强对掠海目标的探测能力。新型对空防御火控系统将采用双基地MIMO体制雷达(如图4 所示),通过在母艇上搭载发射阵列,其每个子阵发射相互正交的信号,在责任空域形成低增益宽波束;在无人艇搭载接收阵列,与发射阵列之间形成双基地MIMO雷达结构,接收的雷达信号回传母艇处理时形成同时数字多波束,用于覆盖发射的宽波束空域。利用母艇和无人艇形成双基地MIMO雷达体制,充分发挥了分布式雷达的空间优势和正交波形频率优势,可有效提升现有雷达组网系统战术技术性能。
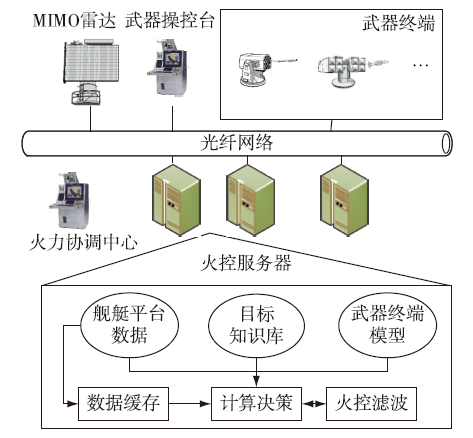
新型火控系统的功能结构如图5 所示,其火控服务器核心主要包含3个功能模块。数据缓存功能模块实时记录母艇和无人艇平台数据、雷达发射参数、无人艇雷达接收信号、目标跟踪轨迹等信息;计算决策功能模块利用母艇的计算服务器完成同时数字多波束处理,结合反舰导弹知识库和历史轨迹对目标进行机动识别、多维特征提取、干扰诱骗控制等处理;火控滤波功能模块负责为不同的武器终端定制交互多模型(Interacting Multiple Model,IMM)火控滤波器结构,以提供更精确化的目标瞄准数据。
2.2 双基地MIMO雷达信号模型
假设双基地MIMO雷达采用均匀线阵,如图4 所示,有 K个非相干远场的突防导弹目标,θk为第k个目标的雷达波到达方向(Direction of Arrival,DOA),ϕk是第k个目标的雷达波离开方向(Direction of Departure,DOD),发射阵列发射的正交波形B=[b1,b2,...bM]T,经过目标反射由接收阵列接收到的数据矩阵可以表示成[9-10]:
Z=[z1,z2,...zN]T= ar(θk)βk (ϕk)B+W
式中,zn为第n个阵元接收的回波信号;βk和fdk=2vdkf0/c分别是第k个目标的发射系数和多普勒频移;vdk为目标径向速度;f0为中心频率;W为加性高斯白噪声矩阵;at(ϕk)和ar(θk)分别为发射和接收阵列的导向向量。
无人艇接收的雷达回波信号回传母艇,经过匹配滤波后[11],可得
x(t)=(AR$\circ$AT)s(t)+n(t)
式中,$\circ$为Khatri-Rao积;AR=[ar(θ1),ar(θ2),...,ar(θK)]为K个接收阵列导向向量[ar(θ1),ar(θ2),...,ar(θK)]组成;AT=[at(ϕ1),at(ϕ2),...,at(ϕK)]为K个发射阵列导向向量[at(ϕ1),at(ϕ2),...,at(ϕK)]组成;s(t)=[s1(t),s2(t),...,sK(t)]T=[β1 ,β2 ,...,βK ]T为一个列向量,其元素为K个目标的反射系数与多普勒频移的乘积。
最后,取J个快拍组成接收信号矩阵:
X=[vec(x(t1)),vec(x(t2)),...,vec(x(tJ))]=(AR$\circ$AT)S+N
式中,vec(.)为向量化算子;S=[s(t1),s(t2),...,s(tJ)];N=[n(t1),n(t2),...,n(tJ)]为J个高斯白噪声快拍组成的矩阵。
3 新型火控系统目标探测优势
对空防御火控系统的首要任务就是对敌来袭空中目标进行快速、准确的辨别定位,以实施精确打击。
未来防空作战,对空防御火控系统需要同时应对多个不同种类的目标。导弹武器系统发射后,防空导弹通常依靠弹上末制导(或者专用制导雷达)获取目标精确跟踪信息,用于实施精确拦截控制,而对于导弹发射前的目标跟踪精度要求相对不高,一般由传统相控阵雷达以搜索加跟踪(Track and Search,TAS)的方式同时提供多个拦截目标信息,如需要提高某一目标的跟踪精度,可分配专门的针状跟踪波束对目标进行反复的周期性探测,但跟踪波束将占用专门的雷达驻留周期,一般使用1°×1°左右的波束对常规空中目标进行跟踪时,为获得比较稳健、理想的跟踪效果,至少需要10 Hz的数据率,因此相控阵雷达精确跟踪的目标数量和测量精度还是有一定局限性。而舰炮武器系统在发射前就需要毫弧级的高精度目标跟踪信息,特别是对付高机动反舰导弹目标,数据率要求达到50 Hz甚至更高,将占用大量的雷达资源,因此目前国内中小口径舰炮武器系统内还是保留系统专用的常规单脉冲跟踪雷达,用于保证目标跟踪精度,但是对于多目标跟踪能力就会受限。
新型火控系统内的MIMO雷达采用正交波形结合双基地雷达体制,具备很多独特的潜力,包括目标定位精度改善、欺骗干扰对抗能力、抗饱和攻击能力等[12]。
1)双基地MIMO雷达使用超大时宽发射信号工作,有效降低雷达的峰值功率,可提高雷达抗信号截获能力,并且多个独立的信号均分发射功率,被截获的距离进一步降低。
2)MIMO雷达是宽波束发射,同时多波束接收,可对责任空域内进行长时间连续探测,责任空域内的全部目标均能同时探测跟踪,只要雷达的信号处理和数据处理能力足够强,理论上可不受时间资源的约束,同时跟踪无穷多个目标。实际工程中通过合理的硬件平台设计,完全可以通过计算资源换取跟踪目标容量和精度的提升,实现50 Hz的数据率对数百批目标的精密跟踪。因此,新型对空防御火控系统的抗饱和攻击的能力将显著增强。
3)由于MIMO雷达既有接收波束形成,也有等效发射波束形成,因此既可测量目标的接收角度,也可测量目标的发射角度,两次测量相互独立,且精度相同,可通过对这些角度信息的测量实现对目标的交叉定位。在同等阵元和信噪比条件下,与普通相控阵雷达的单脉冲测角方法相比,MIMO雷达对目标交叉定位的测角精度得到提高,而且利用外围无人艇搭载发射阵列一定程度上也可改善低角跟踪的性能。
在新型对空防御火控系统中,采用上述双基地MIMO雷达体制(也可通过增加无人艇数量扩展为多基地雷达系统),充分利用了频率和空间分集的优势,利用计算资源换取目标容量和探测精度的提升,同时利用无人艇前出并高速回传雷达接收信号,改善了对掠海飞行目标的低角跟踪性能,可有效提升系统对空防御系统对反舰导弹的拦截能力。
4 仿真分析
由上可知,新型火控系统包括多目标检测、群目标分辨、多目标跟踪,以及火控滤波等核心算法,同时也涉及无人艇的数量和部署等问题,而本节主要针对反舰导弹饱和攻击中出现的多目标DOD和DOA联合交叉定位的问题进行了仿真,用于验证新型火控系统的多目标处理能力,也是进一步进行多目标精确跟踪的基础。
本文采用平行因子(Parallel Factor Analysis,PARAFAC)理论来实现新型火控系统中对来袭多目标的DOD和DOA联合估计的能力。PARAFAC模型[13]是一种三线性分解的方法,它不需要常规二维矩阵分解的正交性或其他约束条件,即可对模型进行辨识。
根据双基地MIMO雷达信号模型,有
X=(AR$\circ$AT)S+N= = S+N
式中,Xn=ATDn(AR)S+Nn,也可以写成另外一种形式:
xm,n,j= AT(m,k)AR(n,k)S(j,k)
m=1,2,...M;n=1,2,...N;j=1,2,...J
Xn为这个三线性模型的一个方向的切片。根据三线性模型的对称性,另外两个方向的切片可以表示为:
Ym=STDm(AT)
Zj=ARDj(ST)
进而可以构造Y和Z矩阵:
Y= =[AT$\circ$ST] ,Z= =[ST$\circ$AR]
即完成了PARAFAC建模,然后采用三线性交替最小二乘(Trilinear Alternating Least Square,TALS)算法就可以估计得到多目标的DOA和DOD。
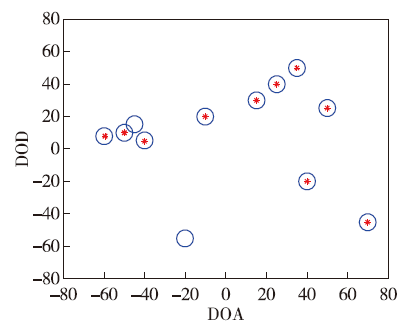
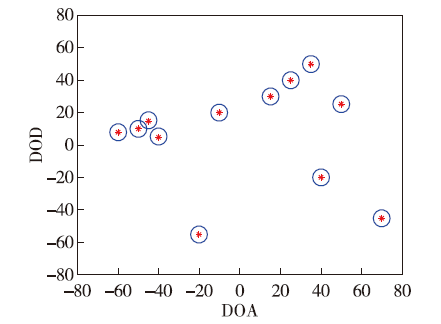
仿真试验比较了传统Capon算法[14]和PARAFAC算法的多目标检测性能,发射阵元M=6,接收阵元N=8;考虑空中12个目标,发射角分别为{-55,-45,-20,5,8,10,15,20,25,30,40,50},接收角分别为{-20,70,40,-40,-60,-50,-45,-10,50,15,25,35};500个脉冲,每个脉冲的采样个数为512个,信噪比8 dB;图6 显示了采用Capon算法对多目标的角度估计结果;图7 显示了采用PARAFAC算法对多目标的角度估计结果。两幅图中目标真值用圆圈表示,符号“*”代表估计值。
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
通过仿真结果可以看出,对于相对靠近的多目标而言,PARAFAC算法表现出较好的分辨性能,实际作战应用中可以布设更多的阵元,进一步提高多目标分辨能力,增强火控系统对空多目标的探测能力。
以上仿真验证了新型对空防御火控系统的多目标精确定位能力,体现了其对抗饱和攻击的潜力。该系统的信息处理模型也符合舰艇公共计算环境的架构,可适配多型武器终端拦截反舰导弹,具备一定的技术可行性。
5 结束语
随着反舰导弹突防手段的升级,除了原有对空防御火控系统的升级外,本文结合未来海战场无人艇的应用,采用新体制雷达,构建新型对空防御火控系统信息架构。该设计充分挖掘了雷达信号特征,为多武器终端按需定制目标跟踪数据。通过分析,并结合多目标交叉定位算法的仿真验证,显示了新系统在低角探测、信息融合,以及抗饱和攻击等方面的潜在优势,为舰艇综合对空防御系统的设计提供技术参考。