 PDF(1285 KB)
PDF(1285 KB)

DR/GPS/DME/VOR Integrated Navigation and Performance Evaluation Methods Based on RNP Operation
MA Hang-shuai, WANG Dan, SUN Xiao-min
PDF(1285 KB)
 中国指挥与控制学会会刊
军事装备类重点期刊
中国指挥与控制学会会刊
军事装备类重点期刊
DR/GPS/DME/VOR Integrated Navigation and Performance Evaluation Methods Based on RNP Operation
In order to improve the integrated navigation performance of the civil plane and ensure the safety of the RNP operation, an onboard integrated navigation system and performance evaluation method based on DR/GPS/VOR/DME is proposed. Considering multi-sensor error,the system error model is established. The measurement model of system is designed based on residual error χ2 detection method. The square-root filter based on sequential processing is used to implement position optimization estimation. Simulation result indicates that the integrated navigation can estimate the position accurately. The ANP algorithm can estimate the real-time error characteristics of integrated navigation system during the 95% time and have high assessment precision, which can satisfy the requirement of RNP.
RNP; integrated navigation; performance evaluation; Kalman filter {{custom_keyword}};
| [1] |
ICAO Doc 9613-AN/937. Performance Based Navigation(PBN) manual.Montreal, International Civil Aviation Organization[Z]. 2013.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [2] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [3] |
RTCA DO-283A, Minimum Operational Performance Standards for Required Navigation Performance for Area Navigation[S]. Washington D C, 2003:8-9.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [4] |
中国民航航空局. 基于性能的导航实施路线图[Z]. 2009-10.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [5] |
737 Flight Crew Operation Manual[R]. Boeing Company, 2006.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [6] |
787 Flight Crew Operation Manual[R]. Boeing Company, 2008.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [7] |
A319/A320 Aircraft Maintenance Manual[R]. Airbus Company, 2005.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [8] |
A380 Technical Training Manual[R]. Airbus Company, 2009.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [9] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [10] |
秦永元. 卡尔曼滤波与组合导航原理[M]. 西安. 西北工业大学出版社, 1998.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [11] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [12] |
Roxanch Chamlou,TIS-B: Calculation of navigation accuracy category for position and velocity parameters. New York: IEEE proceedings, 2004:1-13.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [13] |
RTCA DO-236, RTCA DO-236, Minimum aviation system performance standards[S]. Washington D C, 2003:C1-C5.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| {{custom_ref.label}} |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
PDF(1285 KB)
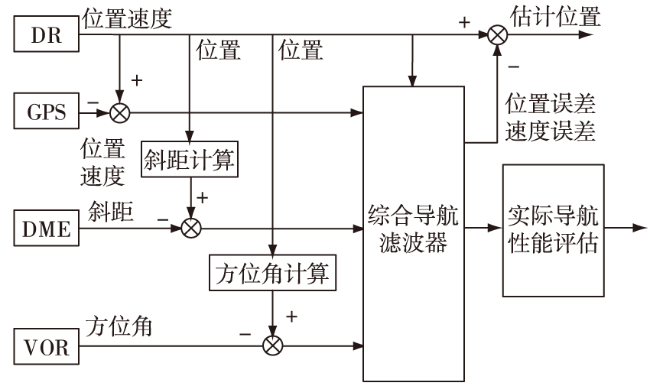
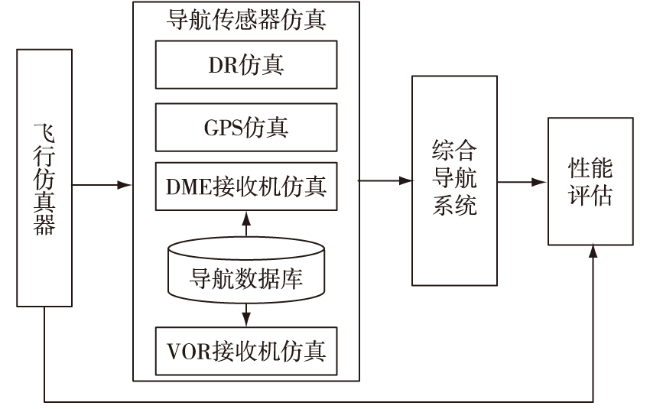
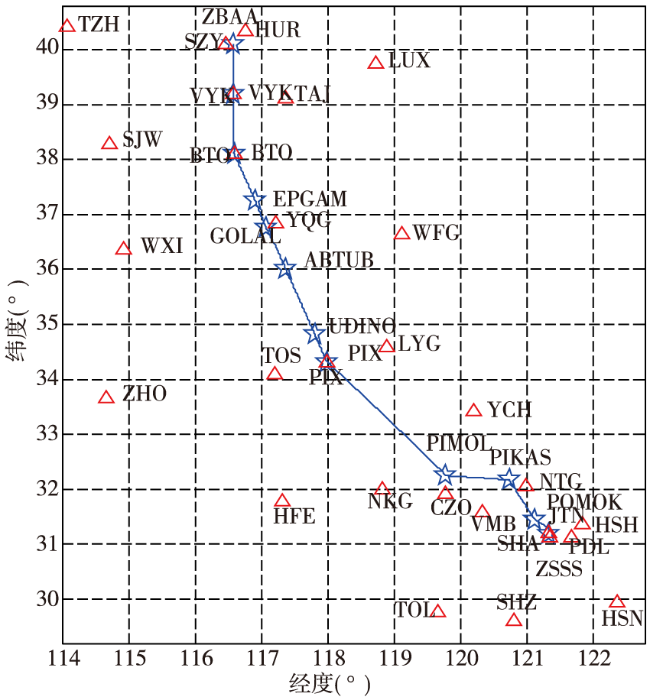
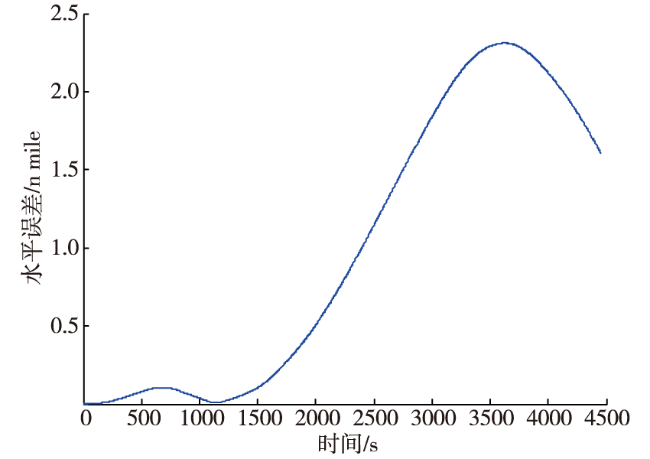
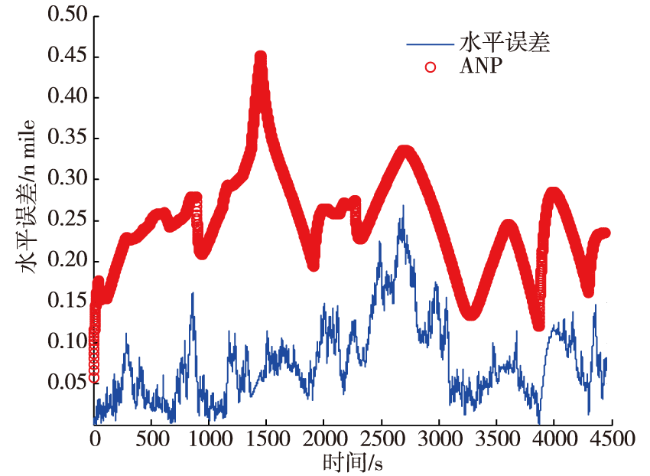
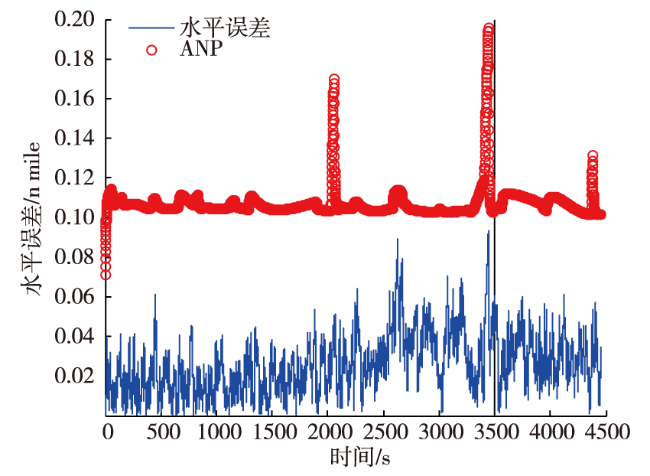
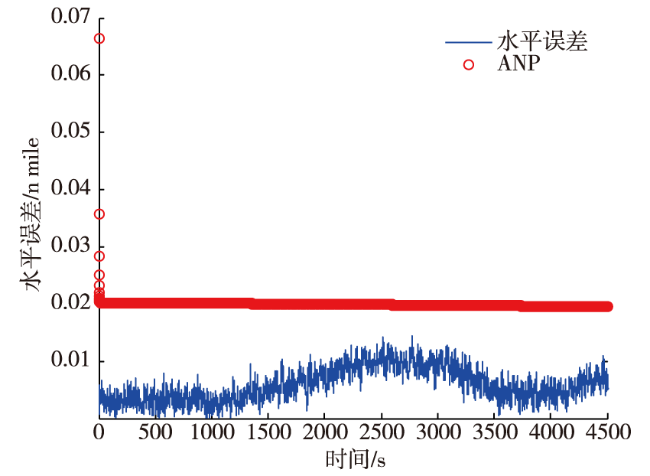
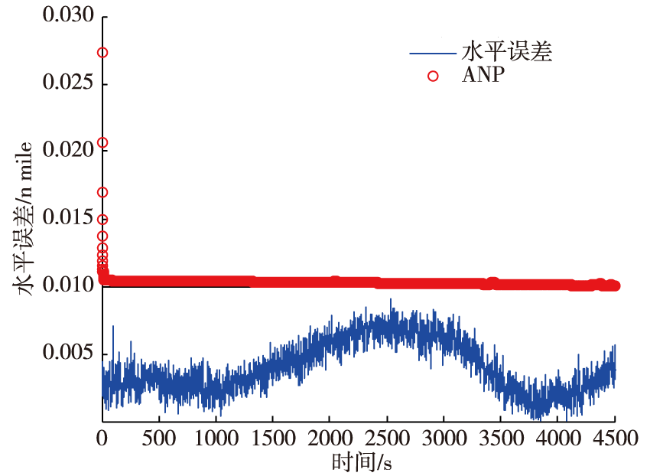
 图1 基于DR/GPS/DME/VOR的综合导航架构图图2 仿真试验环境结构图图3 飞行轨迹水平位置曲线及航路中无线电台分布示意图图4 DR系统水平位置误差曲线图5 DR/VOR/DME组合导航位置误差图6 DR/DME/DME组合导航位置误差图7 DR/GPS组合导航位置误差图8 DR/GPS/DME/DME/VOR/DME组合导航位置误差
图1 基于DR/GPS/DME/VOR的综合导航架构图图2 仿真试验环境结构图图3 飞行轨迹水平位置曲线及航路中无线电台分布示意图图4 DR系统水平位置误差曲线图5 DR/VOR/DME组合导航位置误差图6 DR/DME/DME组合导航位置误差图7 DR/GPS组合导航位置误差图8 DR/GPS/DME/DME/VOR/DME组合导航位置误差/
| 〈 |
|
〉 |

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}