 PDF(1375 KB)
PDF(1375 KB)

Effective Search Area Modeling of Sonar Buoy Array
LI Xin-shu, LI Wei-bo, LUO Mu-sheng
PDF(1375 KB)
 中国指挥与控制学会会刊
军事装备类重点期刊
中国指挥与控制学会会刊
军事装备类重点期刊
Effective Search Area Modeling of Sonar Buoy Array
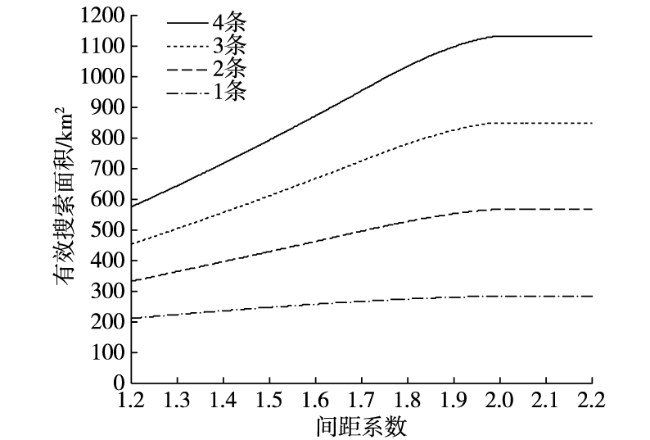
Aiming at the operation application with the sonar buoy to searching submarine, the paper analyses four kinds of typical formations and the characteristics of sonar buoy. The calculation model is built which is suitable in wanton interval and difference survey radius for the region overlaps area of two and three sonar buoys. The calculation method of effective searching area is researched based on the linear array. Then simulation is counted to get the effective area on searching under the influence of quantity of sonar buoys, interval etc to verify the correction of modeling. The research can support the assessing of the critical quotas such as supplementary decision and acquisition probability etc during the operation in searching submarine with sonar buoy.
effective search area; sonar buoy array; linear array; overlap area; interval of setting {{custom_keyword}};
| [1] |
丛红日, 周海亮, 于吉红. 基于网络化航空搜潜体系的声呐浮标检查性搜索方法[J]. 海军航空工程学院学报, 2016, 31(2):195-200.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [2] |
陶晨辰, 鞠建波, 王承祥, 等. 区域性检查搜潜中声呐浮标的使用方法[J]. 火力与指挥控制, 2013, 38(10):94-96.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [3] |
滕俊, 邵晓方, 吴昊. 潜艇跟踪过程中声呐浮标的作战使用[J]. 舰船科学技术, 2012, 34(8):90-94.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [4] |
丛红日, 沈培志, 栾玉佳. 检查性反潜时声呐浮标阵阵型优化[J]. 海军航空工程学院学报, 2014, 29(4):391-396.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [5] |
戚学文, 严建钢, 金复鑫, 等. 直升机声呐浮标包围阵搜潜模型研讨[J]. 电光与控制, 2013, 20(12):10-14.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [6] |
陈庆风, 鞠建波, 赵明. 反潜巡逻线中声呐浮标的作战使用与搜潜方法[J]. 火力与指挥控制, 2011, 36(9):112-114.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [7] |
曾海燕, 杨日杰, 周旭. 声呐浮标搜潜优化布放技术研究[J]. 指挥控制与仿真, 2012, 34(1):82-85.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [8] |
杨日杰, 周旭, 张林琳. 主动全向声呐浮标跟踪潜艇优化布放方法[J]. 系统工程与电子技术, 2011, 33(10):2249-2253.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [9] |
徐梁, 吴铭. 反潜巡逻线中声呐浮标发现概率评估[J]. 水雷战与舰船防护, 2015, 23(4):66-69.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [10] |
罗木生, 侯学隆, 郑保华. 网络中心与平台中心的声呐浮标探测概率建模[J]. 火力与指挥控制, 2013, 38(4):154-157.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [11] |
杨兵兵, 鞠建波, 张鑫磊. 反潜巡逻机浮标布阵应召搜潜效能研究[J]. 系统仿真技术, 2015, 11(3):202-206.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [12] |
杨云祥, 张博. 声呐浮标网络区域阵形搜潜效能分析[J]. 中国电子科学研究院学报, 2014, 9(5):521-525.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [13] |
谢振华, 李林, 程江涛. 圆形浮标阵搜潜效能评估研究[J]. 舰船电子工程, 2011, 31(12):168-170,180.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [14] |
秦锋, 孙明太, 周利辉. 用博弈论求解浮标最佳工作深度[J]. 电光与控制, 2013, 20(12):27-30.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [15] |
王庆江, 李文海, 彭军, 等. 线形浮标阵搜潜时无人机监听航路规划[J]. 海军航空工程学院学报, 2015, 30(1):91-95.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| {{custom_ref.label}} |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
PDF(1375 KB)
/
| 〈 |
|
〉 |


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}