 PDF(1778 KB)
PDF(1778 KB)

Heterogeneous Cooperative Unmanned System Mission Planning Method
MA Shuo, MA Ya-ping
PDF(1778 KB)
 中国指挥与控制学会会刊
军事装备类重点期刊
中国指挥与控制学会会刊
军事装备类重点期刊
Heterogeneous Cooperative Unmanned System Mission Planning Method
To solve the problem of cooperative operation of heterogeneous unmanned system, a mission planning model of unmanned system and a task scheme optimization method based on genetic algorithm are proposed. The directed acyclic graph and path graph are used to describe the cooperative relationship between tasks, the task alliance and its corresponding task sequence are used as the chromosome individual coding of genetic algorithm, and the genetic crossover operator is realized by the transformation between task alliances; the genetic mutation method of task alliance and task sequence is designed to optimize the proportional structure of the task alliances and the distribution of workload. The simulation results show that this method can solve the mission planning problem of heterogeneous unmanned system. Compared with existing research work, it has better versatility.
unmanned system; cooperative operation; mission planning; grouping; genetic algorithm {{custom_keyword}};
表1 任务联盟{V1,V2,V4}的任务序列 |
| 编号 | ST | T1 | T2 | T3 | T4 | T5 | T6 | ET |
|---|---|---|---|---|---|---|---|---|
| V1 | 1 | 1 | 0 | 0 | 1 | 0 | 1 | 1 |
| V2 | 1 | 0 | 0 | 1 | 1 | 1 | 0 | 1 |
| V4 | 1 | 1 | 1 | 1 | 0 | 1 | 0 | 1 |
表2 拓扑排序结果以及相应路径代价 |
| 编号 | 任务序列拓扑排序 | 路径代价 |
|---|---|---|
| 1 | {ST,T1,T2,T3,T4,ET} | 272.2 |
| 2 | {ST,T1,T2,T4,T3,ET} | 293.1 |
| 3 | {ST,T1,T3,T2,T4,ET} | 270.6 |
| 4 | {ST,T1,T3,T4,T2,ET} | 302.3 |
| 5 | {ST,T1,T4,T2,T3,ET} | 212.8 |
| 6 | {ST,T1,T4,T3,T2,ET} | 223.7 |
| 7 | {ST,T2,T1,T3,T4,ET} | 286.6 |
| 8 | {ST,T2,T1,T4,T3,ET} | 228.8 |
| 9 | {ST,T2,T3,T1,T4,ET} | 206.3 |
| 10 | {ST,T3,T1,T2,T4,ET} | 276.6 |
| 11 | {ST,T3,T1,T4,T2,ET} | 228.0 |
| 12 | {ST,T3,T2,T1,T4,ET} | 197.9 |
表3 任务联盟变异概率示例 |
| 任务联盟 | 个数 | 比例 | 变异概率 |
|---|---|---|---|
| V1,V2,V3 | 7 | 0.2592 | 0.0979 |
| V1,V2,V4 | 1 | 0.037 | 0.6852 |
| V1,V3,V4 | 15 | 0.0556 | 0.0457 |
| V2,V3,V4 | 4 | 0.1481 | 0.1713 |
表4 变异前任务序列及路径代价 |
| 无人系统编号 | 原任务序列 | 路径代价 |
|---|---|---|
| V1 | T1 T3 T4 T5 T6 | 222.8 |
| V2 | T4 | 110.2 |
| V4 | T1 T2 T5 | 154.1 |
表5 变异后任务序列及路径代价 |
| 无人系统编号 | 原任务序列 | 路径代价 |
|---|---|---|
| V1 | T1 T3 T4 T6 | 128.9 |
| V2 | T4 T5 | 58.1 |
| V4 | T1 T2 T5 | 87.2 |
表6 优化结果 |
| SIZE=2 | SIZE=3 | SIZE=4 | |
|---|---|---|---|
| 路径代价 | 395 | 407 | 429 |
| 任务联盟 | {V1,V4} | {V1,V2,V4} | {V1,V2,V3,V4} |
| 任务序列 | V1:{T1,T2,T5,T6} V4:{T1,T2,T4,T5} | V1:{T3,T1,T6} V2:{T5} V4:{T1,T4,T2,T5} | V1:{T3,T1,T6} V1:{T5} V1:{T5} V1:{T2,T1,T4} |
| [1] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [2] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [3] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [4] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [5] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [6] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [7] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [8] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [9] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [10] |
邓启波. 多无人机协同任务规划技术研究[D]. 北京:北京理工大学, 2014.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [11] |
黄长强. 多无人机协同作战技术[M]. 北京: 国防工业出版社, 2012.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [12] |
郜晨. 多无人机自主任务规划方法研究[D]. 南京:南京航空航天大学, 2016.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [13] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [14] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [15] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [16] |
汤可宗, 杨静宇. 群智能优化方法及应用[M]. 北京: 科学出版社, 2015.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| {{custom_ref.label}} |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
PDF(1778 KB)
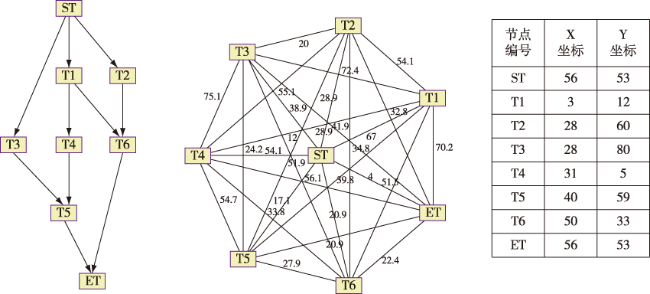
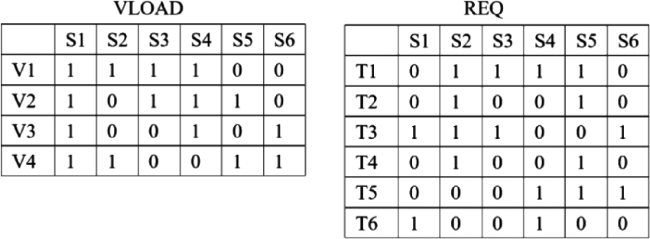
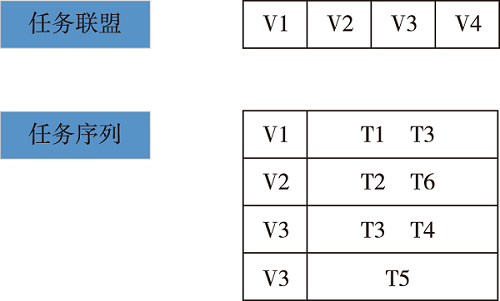
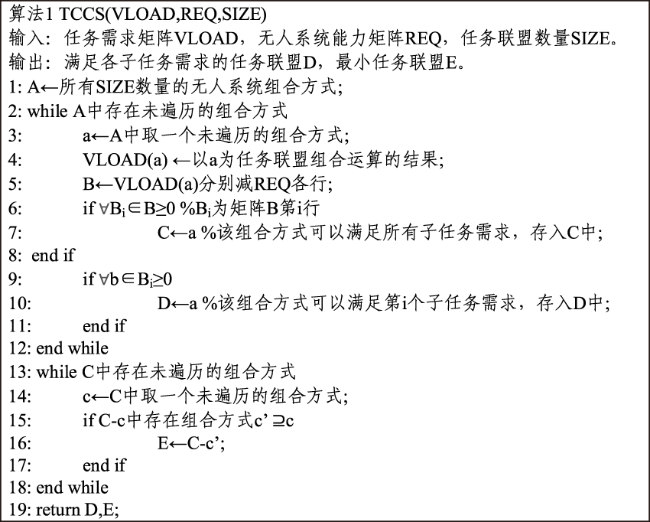
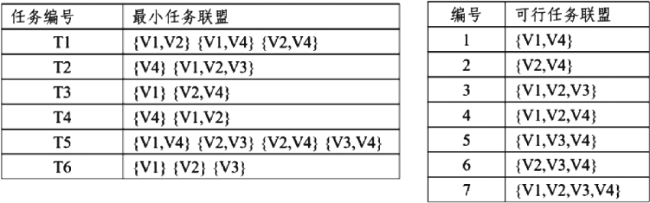
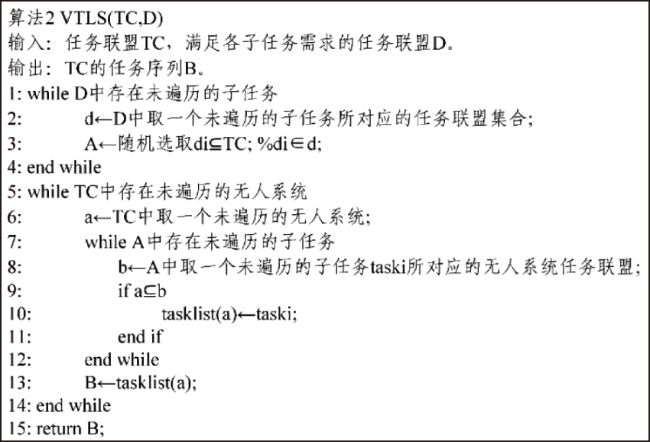
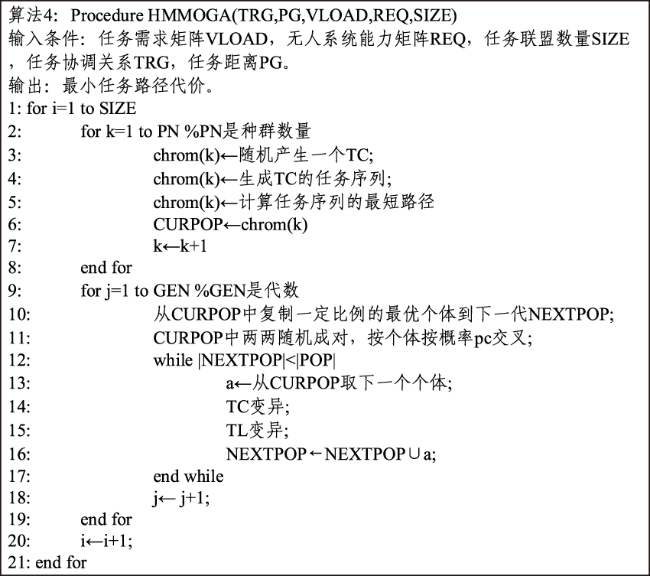
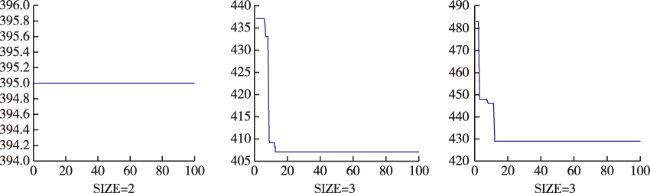
 图1 模型输入条件图2 任务需求矩阵REQ和无人系统能力矩阵VLOAD示例图3 染色体构成示例图4 任务联盟求解方法流程图5 最小任务联盟和可行任务联盟示例图6 无人系统任务序列生成流程
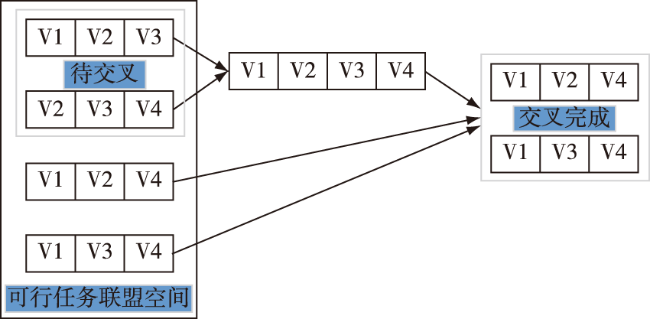
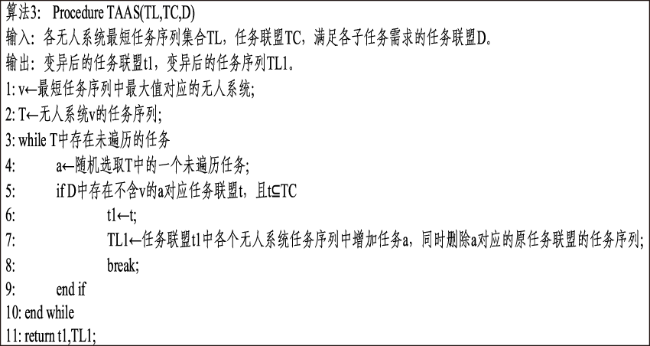
图1 模型输入条件图2 任务需求矩阵REQ和无人系统能力矩阵VLOAD示例图3 染色体构成示例图4 任务联盟求解方法流程图5 最小任务联盟和可行任务联盟示例图6 无人系统任务序列生成流程 表1 任务联盟{V1,V2,V4}的任务序列表2 拓扑排序结果以及相应路径代价图7 交叉算子计算示例表3 任务联盟变异概率示例图8 任务调配方法流程表4 变异前任务序列及路径代价表5 变异后任务序列及路径代价图9 异构无人系统群多目标任务规划流程表6 优化结果图10 HMMOGA迭代优化过程及最优解
表1 任务联盟{V1,V2,V4}的任务序列表2 拓扑排序结果以及相应路径代价图7 交叉算子计算示例表3 任务联盟变异概率示例图8 任务调配方法流程表4 变异前任务序列及路径代价表5 变异后任务序列及路径代价图9 异构无人系统群多目标任务规划流程表6 优化结果图10 HMMOGA迭代优化过程及最优解/
| 〈 |
|
〉 |

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}