 PDF(2528 KB)
PDF(2528 KB)

Simulation Analysis of US UAV Swarm Anti-ship Capability
CHENG Cheng-ren, YANG Jing-yu
PDF(2528 KB)
 中国指挥与控制学会会刊
军事装备类重点期刊
中国指挥与控制学会会刊
军事装备类重点期刊
Simulation Analysis of US UAV Swarm Anti-ship Capability
In order to study the factors influencing the anti-ship capability of US UAV swarm, this paper conducts a series of simulation experiments based on the X-61A combat concept proposed by DARPA in 2017. Firstly, the concept and current situation of UAV swarm are summarized, and then the key influencing factors of UAV swarm anti-ship capability are summarized, including accusation, tactics and structure. Under the classical scenario, the simulation study is carried out with the tactics and structure of the X-61A UAV swarm as variables. The influence of these factors on the anti-ship capability of UAV swarm is given, and the generation mechanism of the anti-ship capability of UAV swarm is analyzed, which lays a foundation for the study of countermeasures.
UAV swarm; swarm tactics; swarm structure; simulation experiments {{custom_keyword}};
表1 红蓝双方装备性能参数 |
| 作战单元 | 装备 | 性能参数 |
|---|---|---|
| 红方驱逐舰 | 主频1 500 MHz | |
| 预警雷达 | 带宽100 MHz | |
| 探测距离448 km | ||
| 防空导弹 | 打击距离120 km | |
| 近程火箭弹 | 打击距离34 km | |
| 蓝方攻击无人机 | 空舰战斗部 | 打击距离30 km |
| 蓝方侦察无人机 | 主动雷达 | 探测距离200 km |
| 蓝方干扰无人机 | 被动雷达 | 主频1 500 MHz |
| 带宽200 MHz | ||
| 干扰机 | 功率90 dBm | |
| 波束角30° |
表2 蜂群内部单体间距对反舰能力的影响 |
| 蜂群单体 距离/m | 攻击机 损失/架 | 侦察机 损失/架 | 蜂群损 失/架 | 被发现距 离/km | 是否摧 毁目标 |
|---|---|---|---|---|---|
| <50 | 3 | 3 | 6 | 10 | 是 |
| 200 | 5 | 3 | 8 | 21 | 是 |
| 400 | 5 | 3 | 8 | 30 | 否 |
| 600 | 5 | 4 | 9 | 50 | 否 |
表3 攻击阵型对蜂群反舰能力的影响 |
| 蜂群攻 击阵型 | 攻击机 损失/架 | 侦察机 损失/架 | 电子干扰 机损失/架 | 蜂群损 失/架 | 是否摧 毁目标 |
|---|---|---|---|---|---|
| 单侧饱和攻击 | 3 | 3 | 0 | 6 | 是 |
| 对侧攻击 | 4 | 3 | 2 | 9 | 是 |
| 环形攻击 | 5 | 4 | 1 | 10 | 否 |
表4 攻击批次对蜂群反舰能力影响 |
| 蜂群攻 击阵型 | 攻击机 损失/架 | 侦察机 损失/架 | 电子干扰 机损失/架 | 蜂群损 失/架 | 是否摧 毁目标 |
|---|---|---|---|---|---|
| 一批 | 3 | 3 | 0 | 6 | 是 |
| 二批 | 3 | 2 | 2 | 7 | 是 |
| 三批 | 3 | 3 | 2 | 8 | 是 |
表5 机型比例对蜂群反舰能力的影响 |
| 蜂群编 成结构 | 攻击机 损失/架 | 侦察机 损失/架 | 干扰机 损失/架 | 蜂群 损失/架 | 是否摧 毁目标 |
|---|---|---|---|---|---|
| 1∶1∶1 | 3 | 3 | 0 | 6 | 是 |
| 3∶1∶1 | 7 | 0 | 0 | 7 | 是 |
| 1∶3∶1 | 3 | 6 | 0 | 9 | 是 |
| 1∶1∶3 | 3 | 2 | 2 | 7 | 是 |
表6 无人机总数对蜂群反舰能力的影响 |
| 蜂群无人 机总数 | 攻击机 损失/架 | 侦察机 损失/架 | 干扰机 损失/架 | 蜂群损 失/架 | 是否摧 毁目标 |
|---|---|---|---|---|---|
| 12 | 4 | 4 | 0 | 8 | 是 |
| 15 | 3 | 3 | 0 | 6 | 是 |
| 18 | 5 | 1 | 0 | 6 | 是 |
| 21 | 6 | 0 | 0 | 6 | 是 |
| 24 | 5 | 0 | 0 | 5 | 是 |
| 27 | 5 | 0 | 0 | 5 | 是 |
| 30 | 5 | 0 | 0 | 5 | 是 |
| [1] |
吴涛, 冯伟强, 张昊. 无人机蜂群对海作战概念模型研究[J]. 指挥控制与仿真, 2022, 44(2):7-11.
为满足无人机蜂群作战运用建模与仿真的需求,采用基于实体行为网络交互(EBNI:Entity Behavior Network Interaction)的建模方法对无人机蜂群对海作战进行概念建模。列出了无人机蜂群对海作战中的实体和任务清单,建立了无人机蜂群对海作战的任务模型、各类实体的动作模型以及无人机蜂群对海作战中的内外部交互模型,为无人机蜂群作战仿真模型研究和系统建设提供参考。
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [2] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [3] |
杨王诗剑. 引领海战革命——浅析无人机“蜂群战术”[J]. 兵器知识, 2016(3):60-63.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [4] |
卢洋, 贾立新, 陈征. 面向无人机编队队形保持的航路规划技术研究[J]. 飞行力学, 2022, 40(4):63-69,75.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [5] |
马铭希, 吴军, 岳龙飞, 等. 基于改进人工鱼群优化的蚁群算法无人机自主航路规划[J]. 兵器装备工程学报, 2022, 43(3):257-265.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [6] |
吴振, 吴红兰. 基于改进遗传算法的无人机航路规划[J]. 电子测量技术, 2021, 44(24):52-58.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [7] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [8] |
余婧, 雍恩米, 陈汉洋, 等. 面向多无人机协同对地攻击的双层任务规划方法研究[J]. 系统工程与电子技术, 2022, 44(9):2849-2857.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [9] |
刘庆利, 商佳乐, 曹娜, 等. 基于改进MVO算法的多无人机任务分配研究[J/OL]. 控制工程:1-8[2022-02-17].
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [10] |
马瑞, 欧阳权, 吴兆香, 等. 基于深度强化学习的多无人机电力巡检任务规划[J]. 计算机与现代化, 2022(1):98-102.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [11] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [12] |
都若尘, 许江涛. 多无人机协同编队控制研究现状及进展[J]. 高师理科学刊, 2022, 42(2):42-46.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [13] |
王琪, 范庆东. 弹性模型结合改进滑模控制器的无人机协同控制[J/OL]. 电光与控制:1-8[2022-04-14].
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [14] |
陈静, 陈光佳, 李天保. 无人机群分布式协同通信对抗技术综述[J]. 舰船电子工程, 2022, 42(3):20-23,53.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [15] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [16] |
谷康. 外军无人机蜂群作战概念研究进展及分析[J]. 航空兵器, 2022, 29(1):52-57.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [17] |
陆晓安, 浦黄忠, 甄子洋, 等. 基于改进一致性算法的无人机集群饱和攻击[J]. 电光与控制, 2021, 28(8):31-35.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [18] |
李大鹏, 刘巍. 马赛克战:重构作战体系以应对高端战争[EB/OL].(2021-10-16)[2022-04-15]. https://3g.163.com/dy/article/GN8A4QF50511DV4H.html.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [19] |
闫海港, 孙晓斌. 海上反无人机蜂群作战概念研究[J]. 舰船电子工程, 2019, 39(11):38-42.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [20] |
杨镜宇, 胡晓峰, 张昱, 等. 基于体系仿真实验的联合作战能力评估技术[J]. 指挥信息系统与技术, 2017, 8(4):1-9.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [21] |
杨镜宇, 胡晓峰. 基于体系仿真试验床的新质作战能力评估[J]. 军事运筹与系统工程, 2016, 30(3):5-9.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [22] |
荣明, 胡晓峰, 杨镜宇. 基于试验床的作战体系弹性评估研究[J]. 系统仿真学报, 2018, 30(12):4711-4717.
信息化条件下的战争是体系与体系的对抗。作战体系弹性是体系为应对多任务变化、扰动、面临攻击、失效而呈现的高可靠性、快速恢复性及完成任务的能力,正日益成为各军事强国关注的热点。通过分析作战体系弹性评估面临的问题,提出了基于试验床的作战体系弹性分析方法。采用“整体”、“动态”、“对抗”的评估理念,用红蓝双方对抗博弈的作战体系弹性分析实验流程,通过建立作战体系弹性评估模型,能够对作战体系弹性进行度量和评估。
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [23] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| {{custom_ref.label}} |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
PDF(2528 KB)
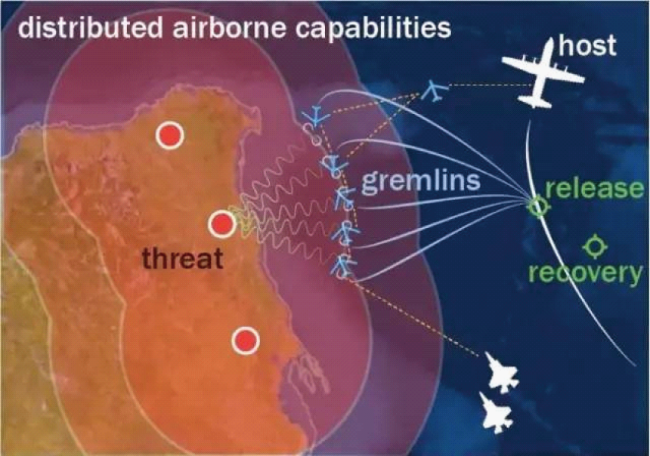
 图1 DARPA提出的小精灵作战构想
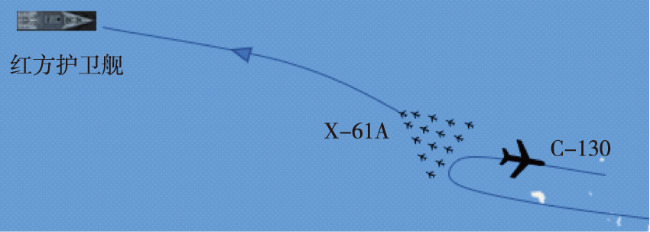
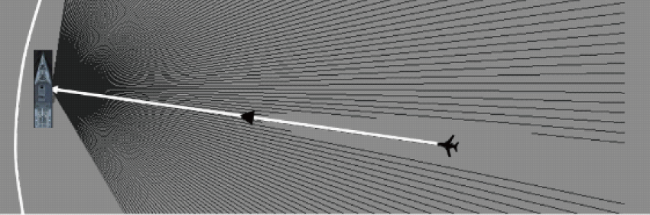
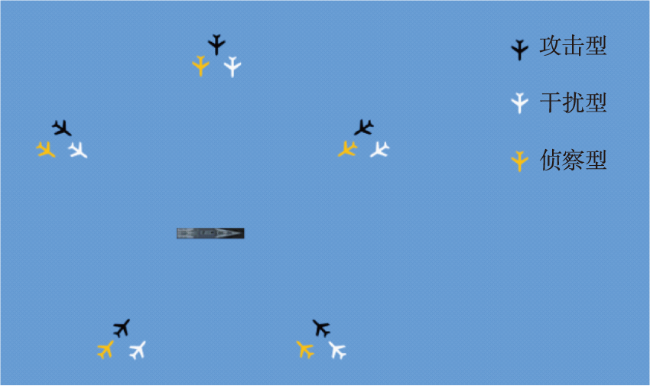
图1 DARPA提出的小精灵作战构想 表1 红蓝双方装备性能参数图2 C-130投放“小精灵”场景示意图3 基本想定电子干扰情况表2 蜂群内部单体间距对反舰能力的影响图4 对侧攻击阵型示意图图5 环形攻击阵型示意图表3 攻击阵型对蜂群反舰能力的影响表4 攻击批次对蜂群反舰能力影响表5 机型比例对蜂群反舰能力的影响表6 无人机总数对蜂群反舰能力的影响
表1 红蓝双方装备性能参数图2 C-130投放“小精灵”场景示意图3 基本想定电子干扰情况表2 蜂群内部单体间距对反舰能力的影响图4 对侧攻击阵型示意图图5 环形攻击阵型示意图表3 攻击阵型对蜂群反舰能力的影响表4 攻击批次对蜂群反舰能力影响表5 机型比例对蜂群反舰能力的影响表6 无人机总数对蜂群反舰能力的影响/
| 〈 |
|
〉 |


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}