
 中国指挥与控制学会会刊
中国指挥与控制学会会刊 机器人逆运动学是机器人进行路径规划和运动控制的基础[1]。传统对六自由度机器人的运动学研究已较为成熟[2],而对具有冗余自由度(超过6个空间运动自由度)的机器人运动学研究仍处于摸索阶段[3]。从传统的机器人学角度,冗余自由度串联机器人的正向运动学相对比较容易处理,但逆运动学因其空间自由度较多,无法获得唯一解。传统逆运动学解算方法不唯一,主要分为数值法和解析法。数值法解算步骤复杂,需要依赖大量的数值迭代运算。例如Koker[4]等人设计多个Elman神经网络来进行冗余机器人的逆运动学运算,并采用遗传算法对关节角度的求解精度进行优化。北京航空航天大学机器人研究所[5]针对九自由度的“5R+4T”混联机器人,提出了一种单一约束条件下,利用反变换法和逆矩阵特征,得到九自由度机器人的正反解。这些方法大都是建立在优化模型基础上,应用智能化方法求解的思路,但也存在过拟合、可靠性低等共性问题,无法从根本上对具有冗余自由度机器人的多个逆解的结果进行优化量化。
本文针对一种典型的串联八自由度机器人系统的机构特点提出几何法和解析法相结合的运动学方法,在解析模型的基础上,简化了多关节机器人的解算步骤和解算复杂程度。
1 机器人模型建立
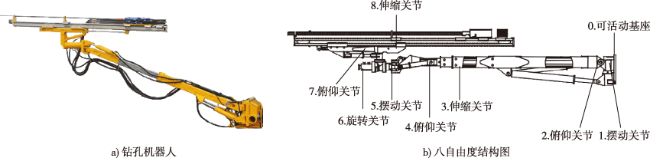
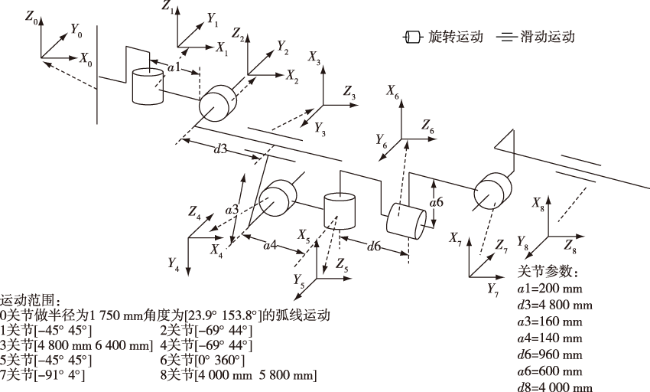
在机器人坐标系结构简图中,基准坐标系{0}在关节变量θ=0时与坐标系{1}重合,末端工具坐标系{8}建立在机器人末端。
根据机器人结构参数可以确定机器人连杆参数和变量,如表1 所示。
表1 八自由度机器人连杆参数表 |
| 坐标系i | 连杆夹角 θi/(°) | 连杆距离 Di/mm | 连杆长度 ai-1/mm | 连杆扭矩 αi-1/(°) | 运动范围 |
|---|---|---|---|---|---|
| 0 | 0 | 0 | 0 | 0 | 为机器人基座,做弧线运动,与坐标系{1}重合 |
| 1 | 0 | 0 | 0 | 0 | [-45° 45°] |
| 2 | -90 | 0 | 200 | -90 | [-69° 44°] |
| 3 | 0 | 4 800 | 160 | -90 | [0 mm 1 600 mm] |
| 4 | 90 | 0 | 0 | 90 | [-69° 44°] |
| 5 | -90 | 260 | 140 | 90 | [-45° 45°] |
| 6 | -90 | 960 | 0 | -90 | [0° 360°] |
| 7 | 0 | 0 | 600 | 90 | [-91° 4°] |
| 8 | 0 | 4 000 | 0 | -90 | [0 mm 1 800 mm] |
2 机器人运动学分析
2.1 机器人正向运动学分析
根据DH法,第i关节坐标系相对于第i-1关节坐标系的变换矩阵为
T=
规定正弦和余弦简化表达形式如下
si=sin(θi),ci=cos(θi),sij=sin(θi+θj),cij=cos(θi+θj),(i,j=1,2,…)
将钻臂各参数代入式(1),可得钻臂各连杆坐标变换矩阵
T= T=
T= T=
T=
T=
T= T=
将每个相邻变换矩阵依次相乘就可以得到钻臂运动学方程
T= T T T T T T T T
钻臂的运动学研究与其他类型的机器人运动学研究相同,在求出机器人的运动学方程之后,只需要将各时刻关节变量的值代入公式(2)中,即可求出各时刻末端执行机构的位置和姿态[7]。
2.2 机器人逆向运动学分析
在冗余自由度串联机器人运动学中,更需要关注的是机器人的逆向运动学分析[8]。相比于机器人运动学正解,机器人运动学逆解的解析结果不具备唯一性,可能存在多解情况,在机器人的实际工作中,往往需要找出一组最合适的逆解。因此,在求解过程中可以根据机器人的结构特点对机器人进行一些关节限制来求取最优解。
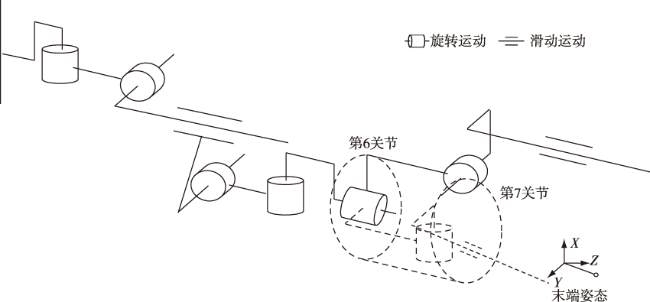
根据机器工作原理,首先给定机器人末端执行机构的位姿矩阵和工作孔的摆角。机器人末端位置可由位置空间确定,机器人末端姿态可由姿态空间确定。位置空间由1个可活动基座以及基座相连的5个关节的可达范围组成,姿态空间由末端3个关节的可达范围组成。工作孔的摆角方向和大小由第6、7关节实现,因此在求解运动学逆解的过程中θ6,θ7可以提前确定,如图3 所示。
运动学逆解的求解过程如下。
1)对于给定的末端位置(p80x,p80y,p80z),姿态(n8,s8,a8),可以写出末端坐标系的状态矩阵
T=
已知θ7,并根据机器人距离工作点距离将d8设定一个初始长度,可求得
T= T T=
由式(3)和式(4)可以求出第6坐标系在基坐标系中的位姿
T= =T(T)-1
2)根据上式可知θ1+θ5,由第6坐标系在基坐标系中的几何关系可求θ1,θ2,d3
θ1=arctan(( T(2,4)-960·cos(θ1+θ5))/( T(1,4)+960·sin(θ1+θ5)))
B=( T(2,4)-960·cos(θ1+θ5)-340·sin(θ1))/sin(θ1)
C= T(3,4)-260d3=
θ2=arctan((160·C+d3·B)/(d3·C-160·B))
至此可求出θ1,θ2,d3,因θ2+θ4=0,可求出q4=-q2,q5=arccos(q1+q5)-q1。
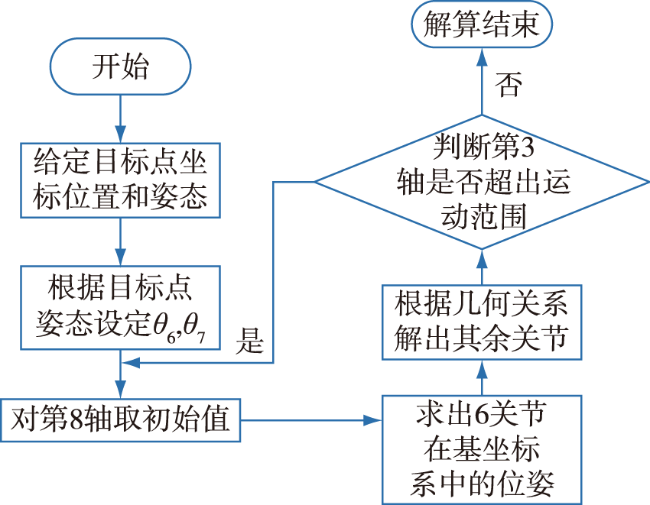
由于d8为初始值,所以求出d3可能会超出可达范围,若超出范围,则需要调整d8重新计算,直至所有关节变量都在运动范围内,计算流程如图4 所示。
3 机器人运动学仿真
在对钻孔机器人运动学正反解理论研究之后,本文通过Matlab仿真平台对分析结果进行验证[9],可以方便有效地得出验证结果,并通过可视化的方式将验证结果展示出来。
3.1 机器人工作空间仿真
机器人工作空间的求解是机器人运动学正解的一部分[10],机器人的工作空间是机器人末端(坐标系{8}的原点)在基坐标系(坐标系{0})中所能达到的空间位置点所组成的集合。可以通过在机器人关节可达范围内随机选取关节值,各关节运动范围如表2 ,进行正解运算并通过Matlab求解出机器人的工作空间,工作空间仿真流程如图5 所示。
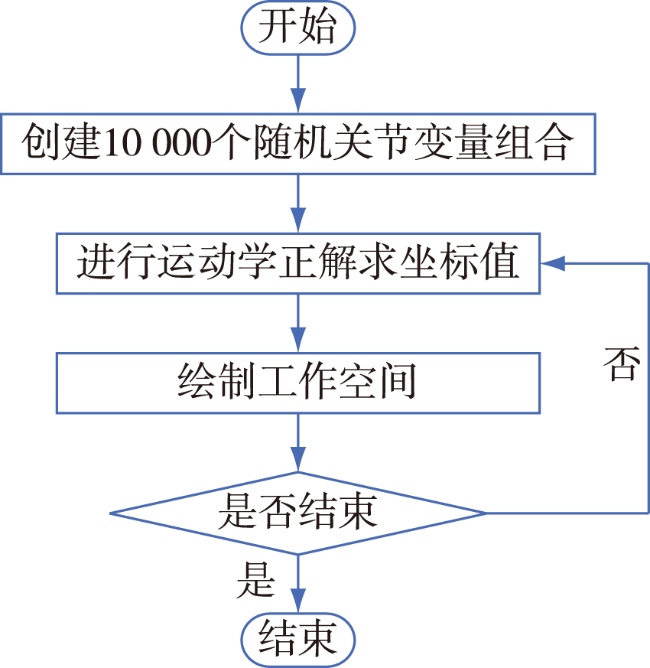
对随机选择的10 000个点进行正解运算后的结果在三维坐标系表示出来如图6 所示。
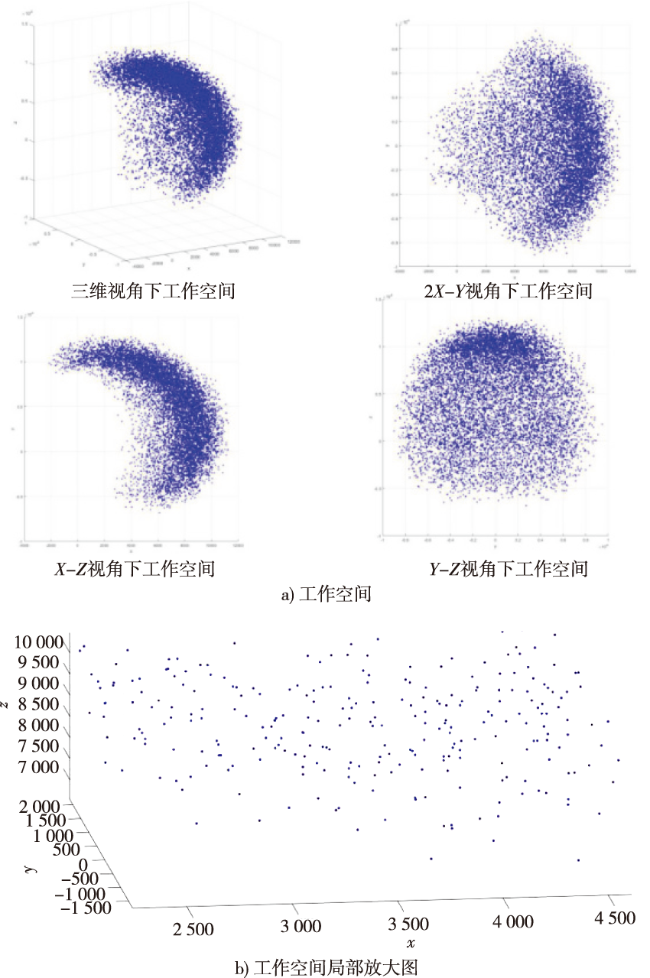
由图6 可以看出,机器人工作空间为弧面,符合机器人的实际工作情况,随机选取的点越多,描述的工作空间越准确。
3.2 机器人逆解验证
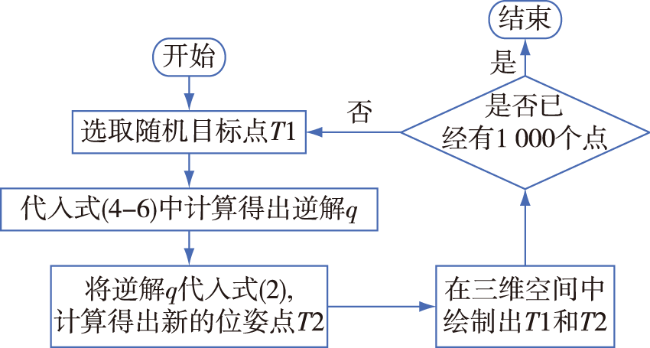
为了验证机器人逆解分析的正确性和准确度,本节通过在工作空间内随机选取1 000个实例点进行验证。首先将随机选取的目标点位姿作为给定位姿,通过Matlab逆解运算,可以解出一组合适的关节变量,将这组关节变量重新进行正解运算,可以得到一组新的位姿矩阵,将新的位姿矩阵与给定的位姿矩阵进行对比,就可以验证该反解方法的准确性,验证流程图如图7 所示。
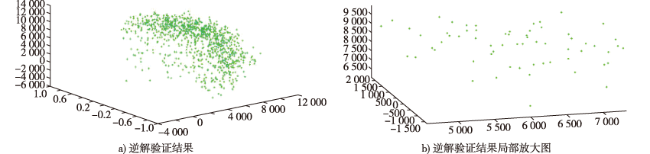
验证完成后的结果描述在三维坐标系中如图8 所示。
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
在1000个逆解验证结果中,蓝色“+”表示给定位姿,绿色“.”表示解算后新的位姿。逆解误差如表3 所示。
表3 逆解结果误差 |
| 逆解误差 | ||
|---|---|---|
| 位置误差/mm | 姿态误差/mm | |
| 最大值 | 2.33×10-5 | 3.15×10-11 |
| 最小值 | 8.92×10-13 | 5.76×10-17 |
| 平均值 | 3.41×10-7 | 8.56×10-13 |
由仿真结果图和误差表中可以看出,这种解析算法的精确度可以满足机器人的工作需要。每个目标点的逆解只有一个,说明该机器人在实际工作中每个目标点逆解是唯一的。
4 结束语
本文结合机器人结构特点和运动特性,提出了一种解析法和几何法相结合的八关节机器人运动学解析方法,为多关节冗余自由度机器人运动学解析提供了一种新思路。算法的仿真结果表明该方法拥有较高的准确度,满足机器人的工作需要,为机器人轨迹规划、运动控制等进一步研究提供有力支持。